Multi-sensor fused unmanned vehicle detection obstacle avoidance system and obstacle avoidance method
A multi-sensor fusion, unmanned vehicle technology, applied in the field of multi-sensor fusion unmanned vehicle detection and obstacle avoidance systems, can solve the problems of camera performance degradation, weakening the safety of unmanned vehicles, causing traffic accidents, etc., and improving stability. and dynamic performance, strong program portability, and enhanced anti-interference ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
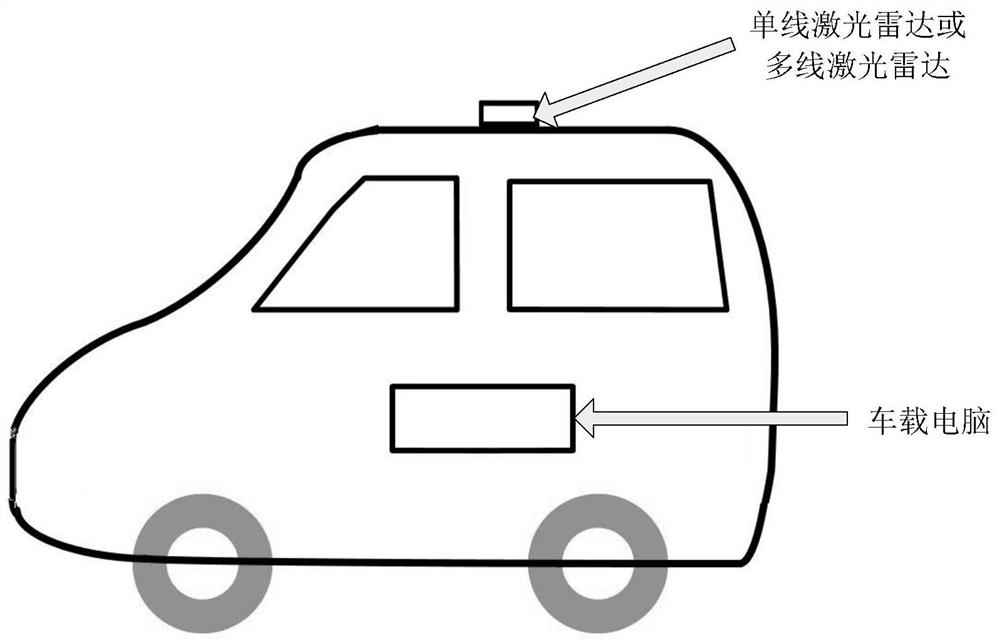
[0083] SICK's laser radar adopts the mature laser-time-of-flight principle and multiple echo technology, non-contact detection, can set the protection area of various graphics according to the needs of the site, and can simply modify the graphics at any time according to the needs of the site, The sensor has reliable anti-interference performance through internal filtering and multiple echo technology. LMS151 and LMS122 are SICK's new high-performance laser radars for short-range detection. The LMS151 series is aimed at objects with a reflectivity of 10%, and the distance can reach 50 meters. The LMS122 detection distance can reach up to 20 meters. In view of the above characteristics, the present invention adopts the laser radar group based on LMS1XXX series to form an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com