A brain-computer collaborative digital twin reinforcement learning control method and system
A collaborative control and reinforcement learning technology, applied in the field of brain-computer interface and artificial intelligence integration, can solve the lack of brain-computer dual-loop interaction mechanism, poor performance of brain-computer hybrid intelligent system, distraction and mental load, etc. problem, to achieve the effect of improving robustness and generalization ability, good transferability, and mutual adaptation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
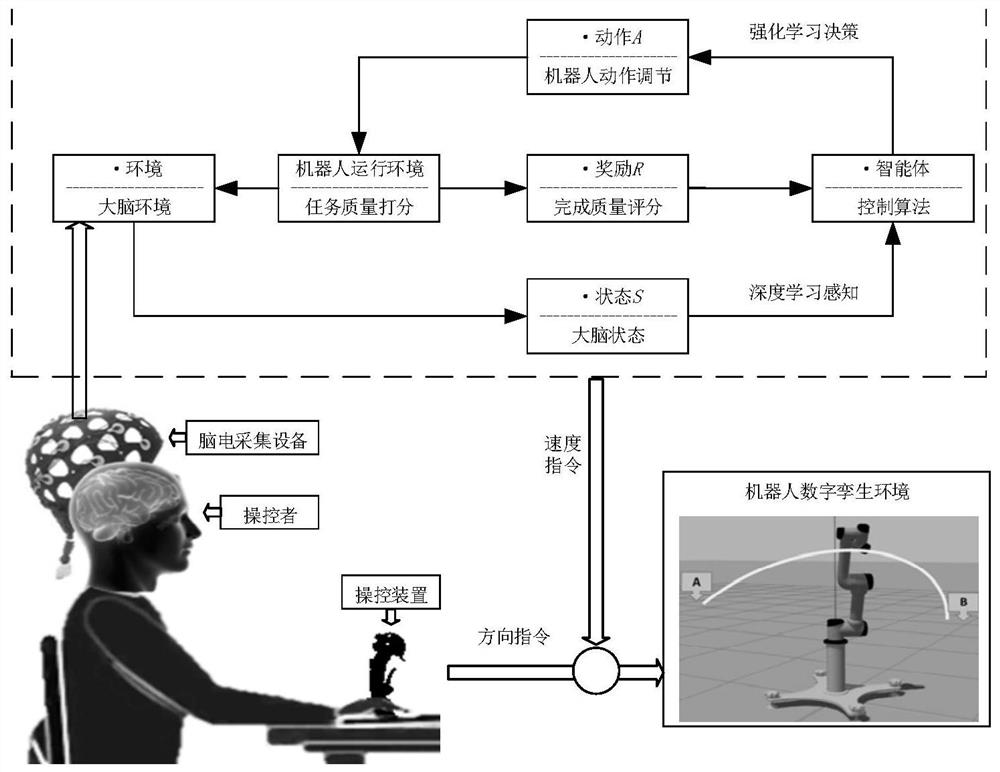
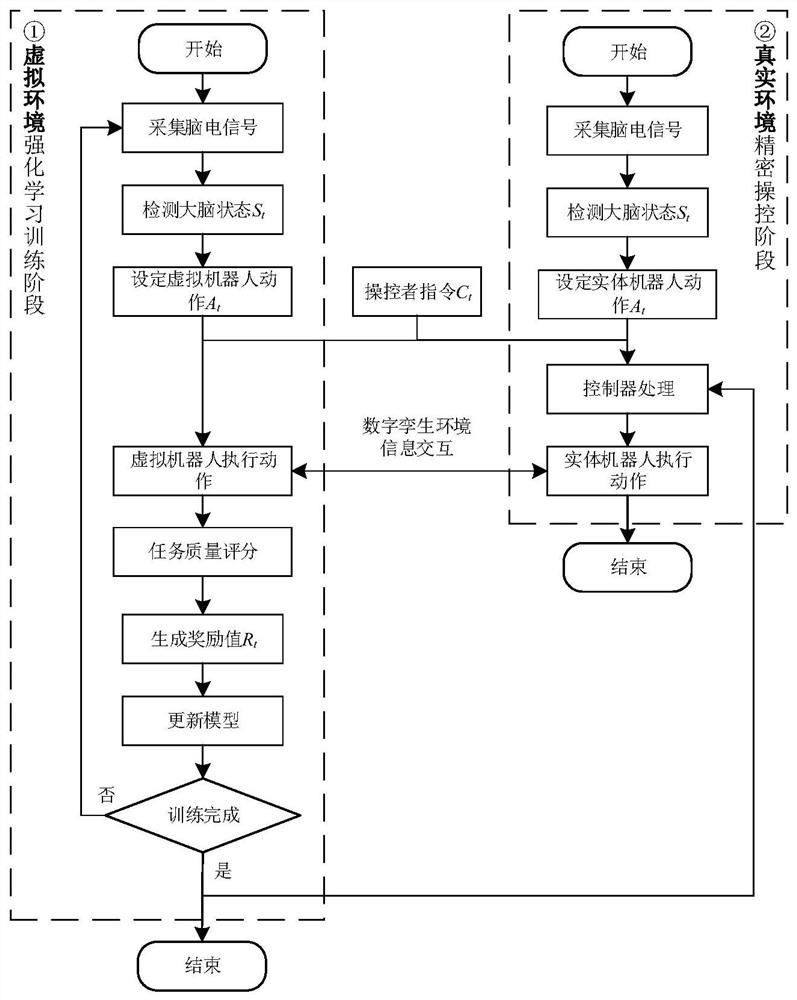
[0047] Transplant the trained model to the controller of the physical robot to realize the precise control of the brain-computer cooperation of the physical robot. At the same time, during the control process, the real environment and the virtual environment are fully synchronized by using digital twin technology, and the parameters of the physical robot controller are corrected in real time.
[0048] Step 1: Build a real physical environment to control the robot. Compared with the virtual training platform, except that the controlled object is a physical robot, other operating objects are the same;
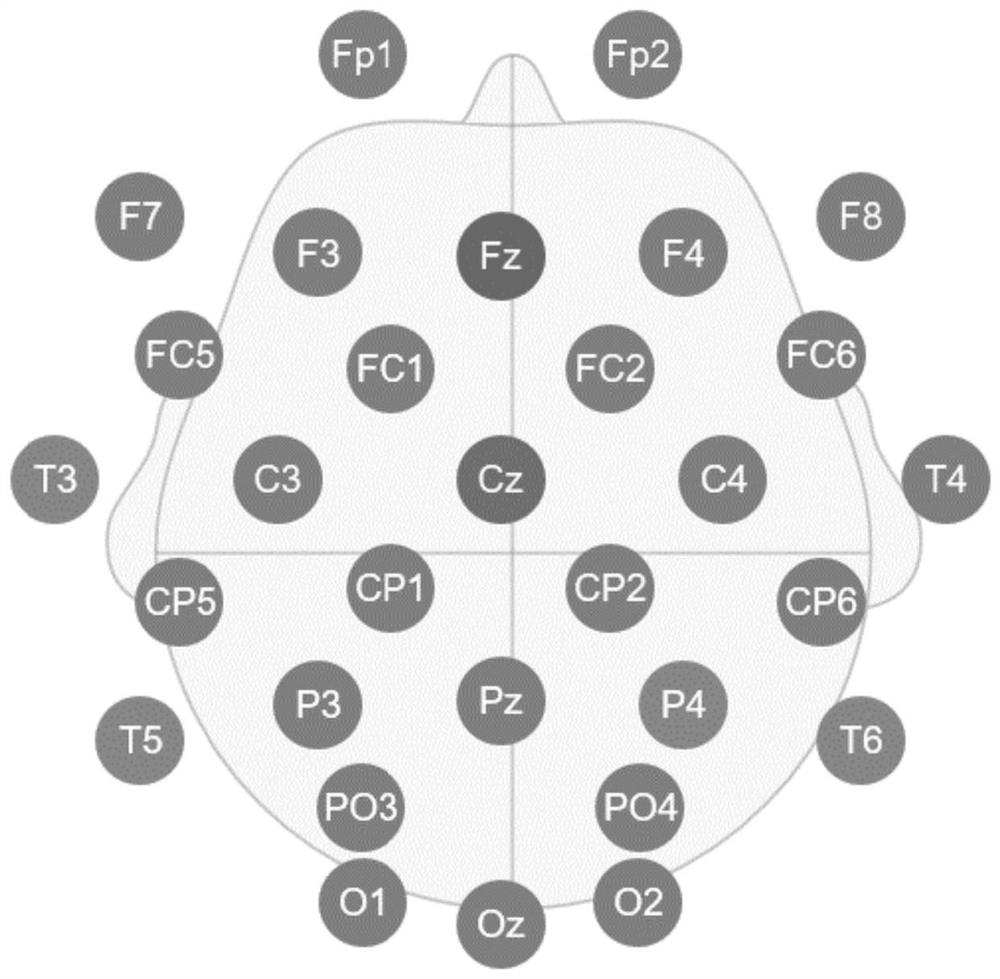
[0049] Step 2: The control starts, and the operator sends a direction command C through the control device at time t t For the physical robot; at the same time, collect the brain surface EEG signal 600ms before time t; the location of the EEG cap channel is in line with the international 10 / 20 standard, and the electrodes are arranged on Fp1, Fp2, Fz, F3, F4, F7, F8, FC1 , FC2, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com