Anti-interference high-precision signal synchronization method based on access code in Bluetooth receiver
A signal synchronization and access code technology, which is applied in the direction of network synchronization, multiplexing multi-code, multi-frequency code system, etc., can solve the problems of missed detection and false detection of detection signals, achieve high signal detection accuracy and reduce missed detection or false detection problems, and improve work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] An anti-jamming high-precision signal synchronization method based on an access code in a bluetooth receiver, comprising the following steps:
[0042] Step 1: Use the access code agreed by both parties as the local training sequence;
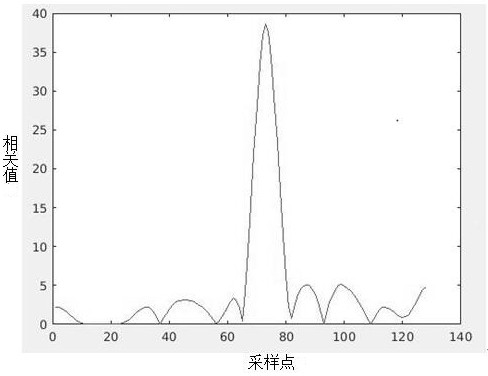
[0043] Step 2: Sampling the received signal, and continuously performing delay differential calculation on two sampling values separated by one symbol period, the delay differential calculation includes phase calculation, and the result of the phase calculation, that is, the phase difference, is used as the sequence to be correlated, and the Sliding correlation operation is performed between the relevant sequence and the local training sequence to find the peak value of the correlation value, and the sampling time corresponding to the peak value is used as the starting position of the access code to realize frame timing synchronization.
[0044] Wherein, the method for obtaining the peak value of the correlation value is as follows: set...
Embodiment 2
[0070] The difference between the second embodiment and the first embodiment is that the phase is not calculated during the delay difference calculation process, and the subsequent correlation calculation is performed directly using the delay difference value.
[0071] when t 0 = T b When , ignoring the influence of noise, the delay difference value is
[0072]
[0073] But at this time the correlation value will be affected by the gain value a 0 impact, because
[0074]
[0075] If I k+m =c m (0≤m≤31), then
[0076]
[0077] Since G(0) is much smaller than 1 / 2, so
[0078]
[0079] Obviously, this correlation value is subject to the gain a 0 Impact. For this, the following energy values need to be calculated
[0080]
[0081] Set the second threshold T h1 E. k , where T h1 is the ratio parameter of the second threshold, when , it is close to the optimal frame timing position. Finds among the sampled values in the subsequent second time length...
Embodiment 3
[0084] Embodiment 3 adds the step of frequency offset estimation on the basis of Embodiment 1 or Embodiment 2, that is, Step 3:
[0085] After realizing frame timing synchronization, the initial position of the access code is determined, and the position of the frame header is determined according to the relationship between the position of the access code and the position of the frame header. Since the frame header is a sequence of 01010101 or 10101010, the waveform of the frame header part is based on a cycle of 2T b recurring. Let the received signal r(t) be in iTb / M The sampling time is r i , delaying the sampling value of the frame header is 2T b Delay differential correlation, and perform summation and angle calculation
[0086]
[0087] in v Indicates the number of symbols involved in frequency offset estimation, and M indicates the oversampling factor.
[0088] From this, an estimate of the frequency offset can be obtained
[0089]
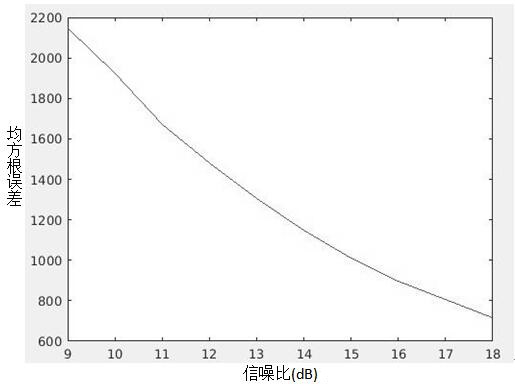
[0090] image 3 The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com