Unmanned aerial vehicle visual attitude and position calculation method based on image marking
A technology for image marking and drones, applied in the field of drone navigation, can solve problems such as failure to meet practical requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
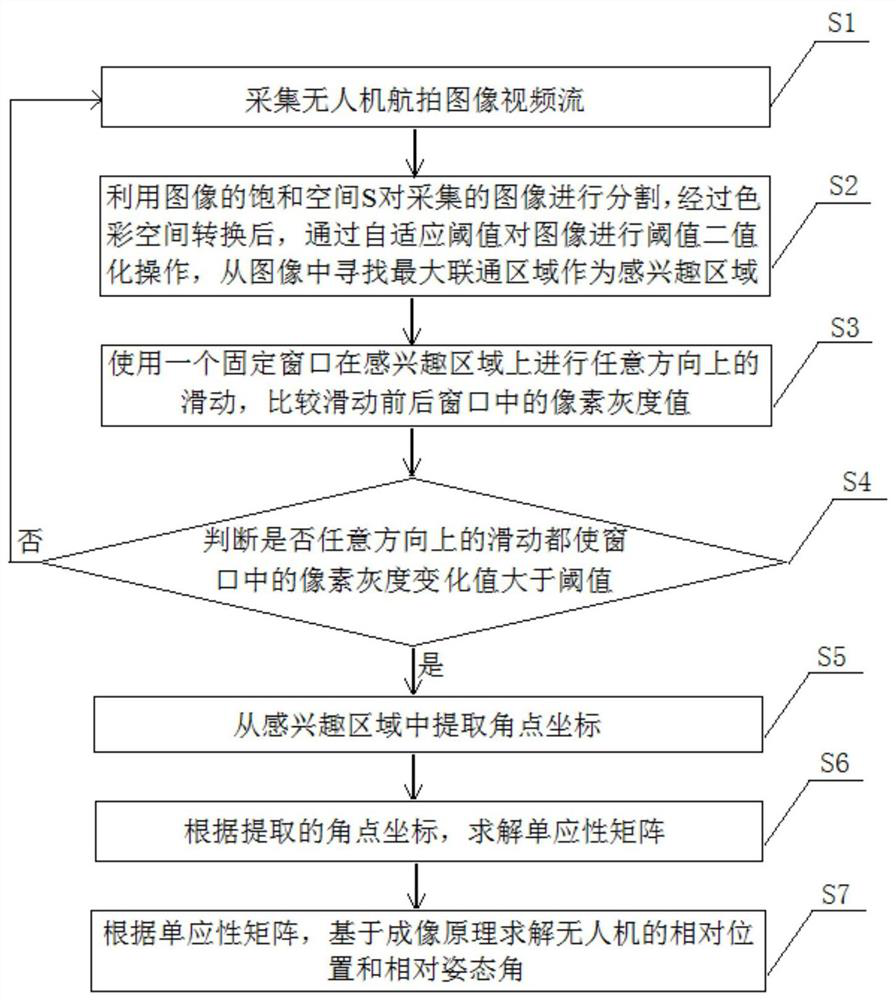
[0101] The first step: the feature mark extraction of the visual mark, which is subdivided into the following steps:
[0102] (1) Acquisition of UAV aerial image video stream
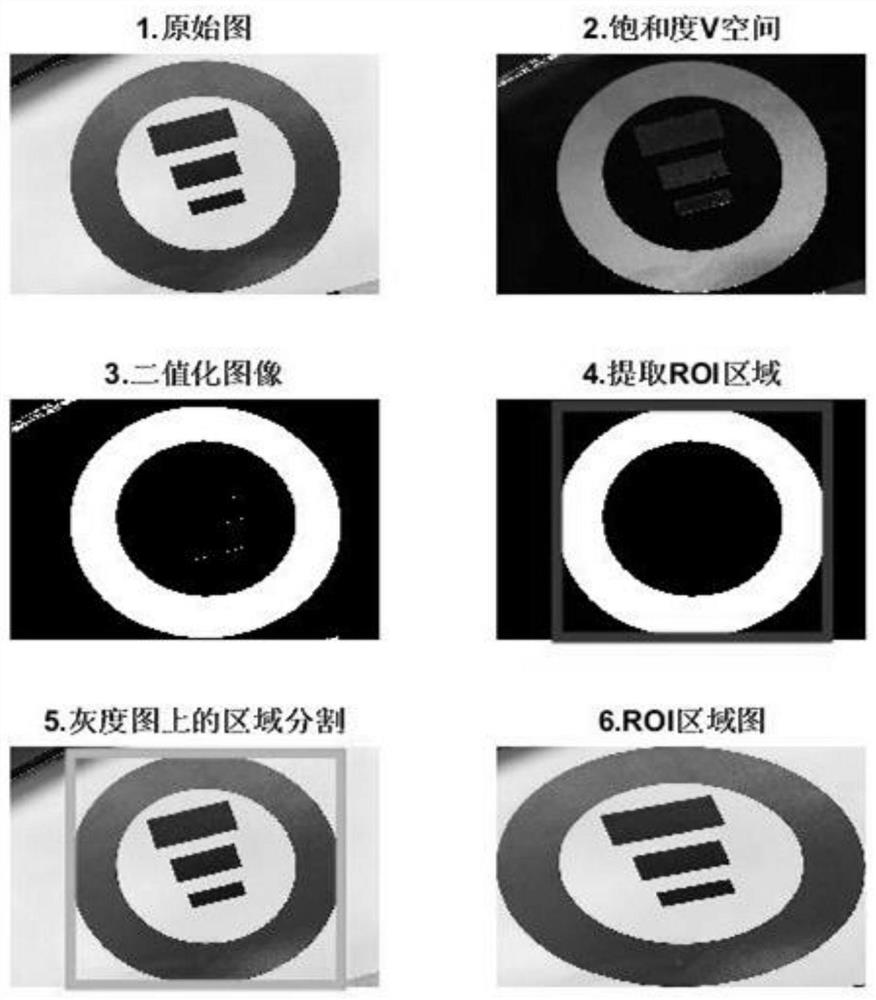
[0103] (2) Extract the region of interest
[0104] Considering that the global corner point extraction takes a long time, the region of interest is used to shorten the global feature corner detection. In the HSV color space, H represents the hue, and its range is 0 to 360°; V represents the brightness of the image, and its value is usually 0 to 1, 1 (or 100%) represents the highest brightness, and 0 represents the darkest brightness ;S stands for saturation, which means the degree to which the color is close to the spectral color, and the ratio between it and the corresponding brightness space. Vivid, 0 means only the gray value corresponding to the brightness. The present invention utilizes the saturation space S of the image, and ideally, uses the S space to segment the collected image, and can eff...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com