A method and device for deep learning training task management and control based on replica mode
A technology of deep learning and task control, applied in the direction of neural learning methods, biological neural network models, neural architectures, etc., can solve problems such as spending a lot of time and energy, and achieve the effects of improving efficiency, clear management logic, and reducing difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
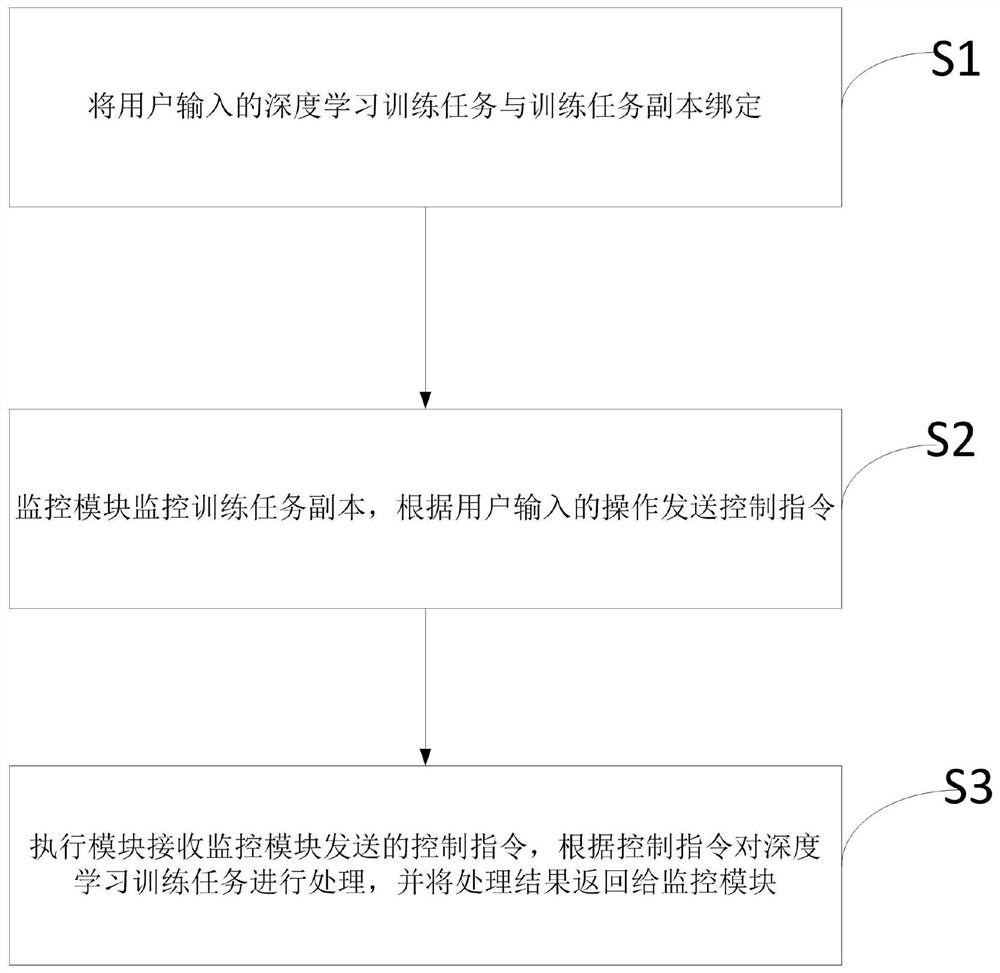
[0055] like Figure 1-Figure 2 As shown, the present invention provides a deep learning training task management and control method based on a replica mode, including:
[0056] S1, bind the deep learning training task input by the user to the copy of the training task;
[0057] S2, the monitoring module monitors the copy of the training task, and sends a control command according to the operation input by the user;
[0058] S3, the execution module receives the control instruction sent by the monitoring module, processes the deep learning training task according to the control instruction, and returns the processing result to the monitoring module.
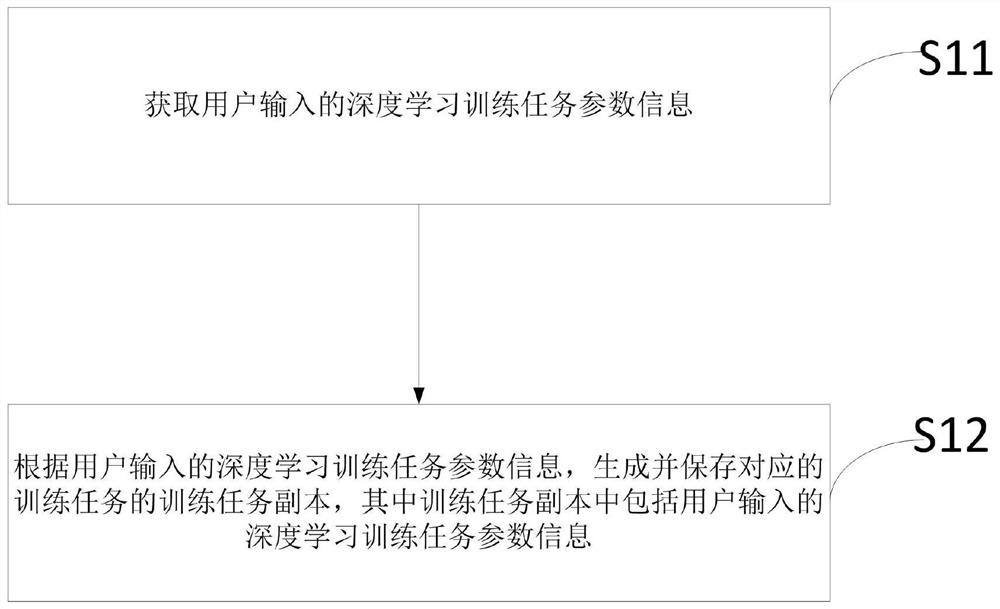
[0059] Among them, such as image 3 As shown, step S1 specifically includes:
[0060] S11, obtain the parameter information of the deep learning training task input by the user;
[0061] S12: Generate and save a training task copy of the corresponding training task according to the deep learning training task parameter informa...
Embodiment 2
[0079] like Image 6 As shown, the technical solution of the present invention also provides a deep learning training task management and control device based on a replica mode, including:
[0080] The binding unit 101 binds the deep learning training task input by the user with the copy of the training task;
[0081] The monitoring unit 102, the monitoring module monitors the copy of the training task, and sends a control instruction according to the operation input by the user;
[0082] The execution unit 103, the execution module receives the control instruction sent by the monitoring module, processes the deep learning training task according to the control instruction, and returns the processing result to the monitoring module.
[0083] Among them, such as Figure 7 As shown, the binding unit 101 specifically includes:
[0084] Obtaining subunit 1011, obtaining the parameter information of the deep learning training task input by the user;
[0085] The generating subu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com