Four-rotor self-adaptive dynamic surface sliding mode controller based on output feedback
A technology of output feedback and quadrotor aircraft, which is applied in attitude control, non-electric variable control, control/regulation system, etc., and can solve problems such as model parameter uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
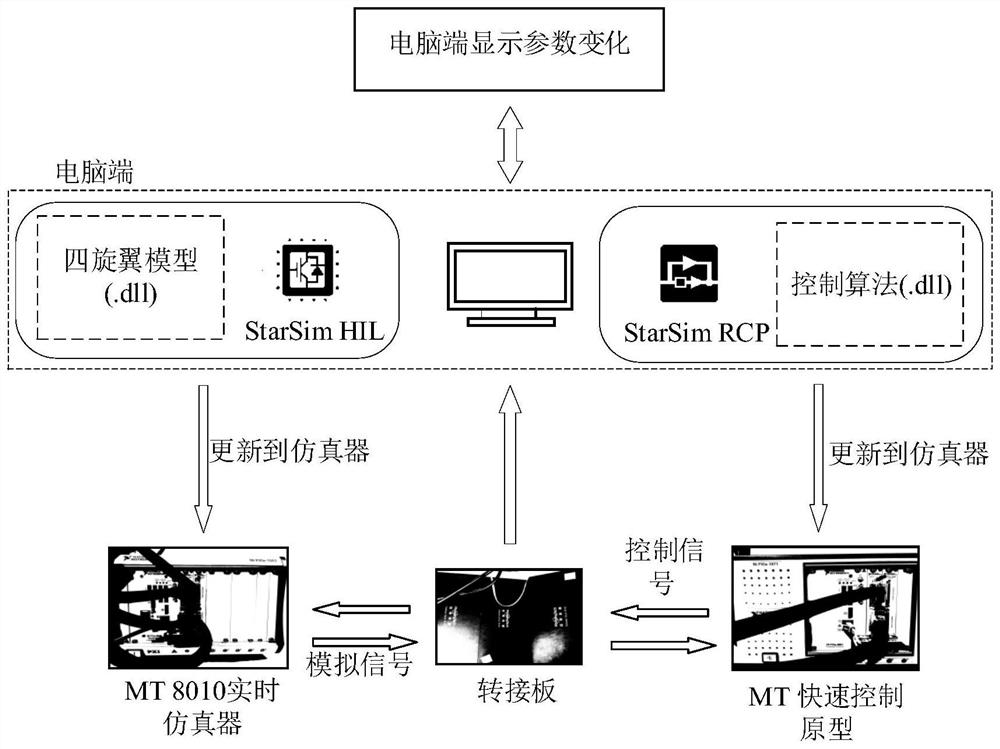
[0254] Use the attached Figure 1-15 The invention is further explained by the semi-physical simulation experiment. The four-rotor adaptive dynamic surface sliding mode controller based on output feedback includes the following steps:
[0255] Step 1) Construct a quadrotor aircraft system model with model parameter uncertainty as shown in formula 1:
[0256]
[0257] The considered quadrotor has the following nonlinear form:
[0258]
[0259] in, is the state variable, and the symbols φ, θ, ψ represent roll angle, pitch angle and yaw angle. The symbols x, y, z represent the horizontal position and height relative to the ground coordinate system. U=[U 1 ,U 2 ,U 3 ,U 4 ] T is the control input signal of the quadrotor, and the function f and function g represent nonlinear smooth functions. In order to facilitate the controller design of the position subsystem and the attitude subsystem, it can be written in the form of state space:
[0260]
[0261] where g i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com