Grey box model parameter identification method and system for robot system
A technology of robot system and gray box model, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as design and control applications, failure of robot system analysis, and low accuracy of dynamic models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
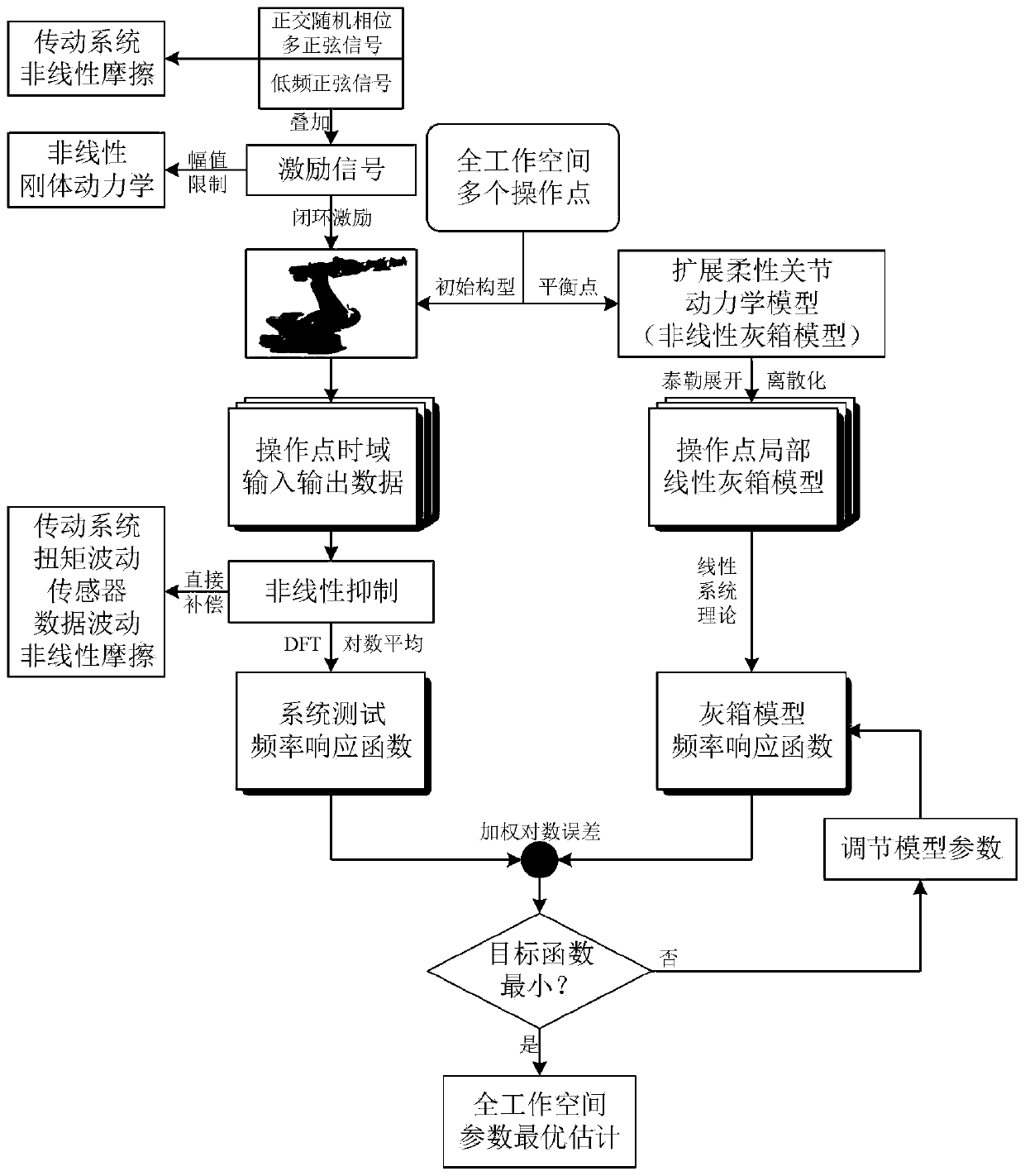
[0058] The idea of the gray box model parameter identification method for the robot system provided in this embodiment is as follows:
[0059] (1) Excite the robot system to be identified to obtain time domain response data.
[0060] Firstly, multiple operating points are selected, and each operating point corresponds to an initial configuration of the robot, so that these operating points cover the entire working space of the robot as much as possible. At each operating point, the closed-loop excitation of the signal in the expected frequency band is performed on the industrial robot system to be identified, that is, the reference signal of the drive joint angle position is provided to the system, and the excitation signal is selected from the superposition of the quadrature random phase multi-sine signal and the low-frequency sinusoidal signal, Therefore, the damping effect of nonlinear friction in the transmission system is reduced, and the measurement signal-to-noise rat...
Embodiment 2
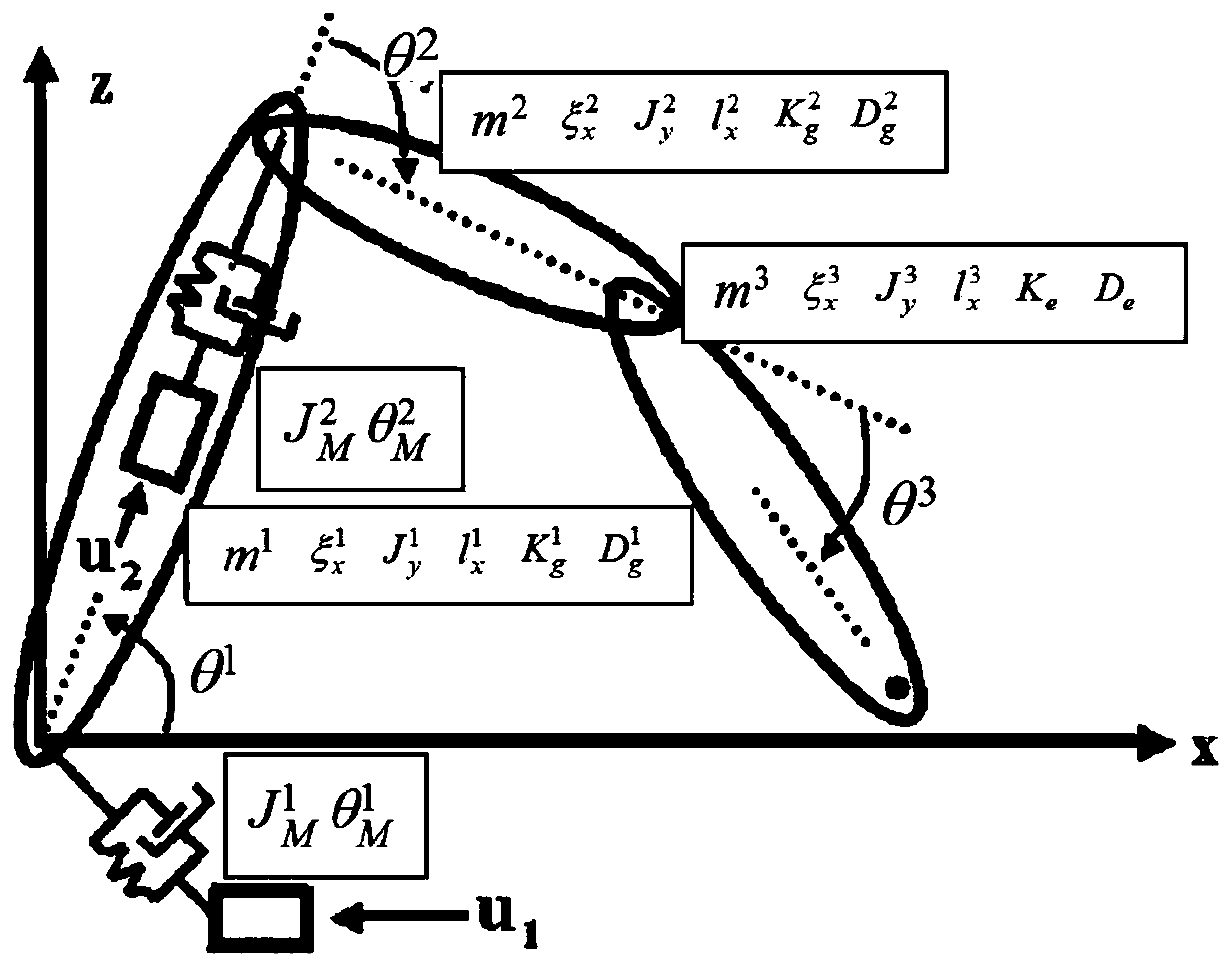
[0116] figure 2 It is a schematic diagram of the dual-arm planar robot system in Embodiment 2 of the present invention. see figure 2 , the planar robot is in the horizontal plane and has two arms, each with a motor at the joint of the arms. Each motor constitutes a drive joint, which can characterize the flexibility characteristics of the joint rotation direction. In order to pursue the accuracy of the dynamic model, a non-driven joint is added in the middle of the arm 2, which is equivalent to "dividing the arm 2 into two". Thus, an extended flexible joint configuration including 2 driven joints and 1 non-driven joint is obtained. Each boom parameter has mass m i ,i=1,2,3, the position of the center of mass Inertia tensor around the center of mass length Each parameter is described on the body coordinate system fixed on the boom. Drive the joint angular position with θ i ,i=1,2 means, the angle position of the non-driven joint is represented by θ e express. Fo...
Embodiment 3
[0153] The present invention also provides a gray box model parameter identification system for a robot system, Figure 6 It is a schematic structural diagram of a gray box model parameter identification system for a robot system according to Embodiment 3 of the present invention.
[0154] The gray box model parameter identification system for the robot system of the present embodiment includes:
[0155] The operating point selection module 201 is used to select multiple operating points in the working space of the robot system; one operating point corresponds to an initial configuration of the robot; multiple operating points cover the entire working space of the robot system.
[0156] The closed-loop excitation module 202 is configured to perform multiple closed-loop excitations on the robot system at each of the operating points to obtain time-domain input and output data of each closed-loop excitation of the operating points; the excitation signal of the closed-loop excita...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com