


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A kind of preparation method and assembly method of miniature magnetron robot, inner core and thin film
A robot and miniature technology, applied in medical science, surgery, etc., can solve the problems of expensive treatment, liver organ damage, long treatment cycle, etc., and achieve good therapeutic effect, good biocompatibility, and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
preparation example Construction
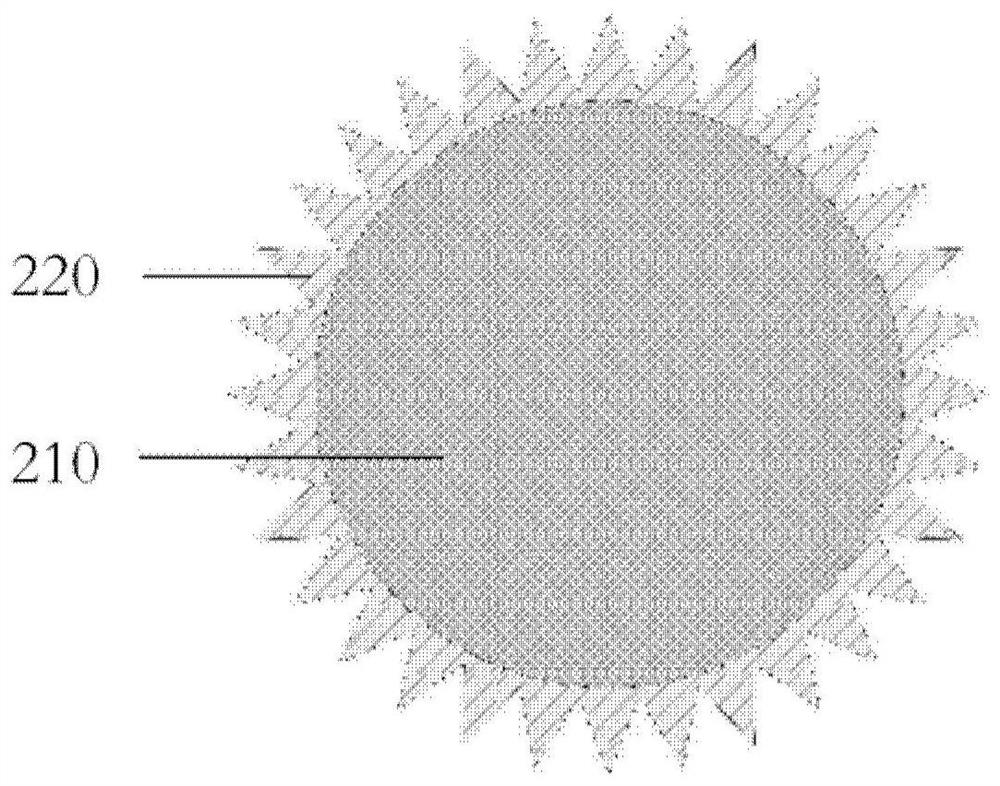
[0058] The present disclosure also proposes a method such as figure 2 The preparation method of the magnetic composite spherical core 210 shown includes the following steps.
[0059] S110, uniformly mix the first magnetic material and the prefabricated liquid of the flexible material according to a first preset ratio to obtain a mixed material.
[0060] Preferably, the first preset ratio of the first magnetic material to the flexible material is 1:2.
[0061] Optionally, the first magnetic material is a plurality of magnetic particles, the diameter of which is not greater than 300 mesh.
[0062] S120, inject the mixed material into two hollow hemispherical moulds.
[0063] S150, demolding the mixed liquid after curing to obtain two hemispheres of the same size.
[0064] S140, bonding the two hemispheres to obtain a magnetic composite spherical core 210 .
[0065] Optionally, when the magnetic composite spherical inner core 210 is spherical, the mold for the magnetic compo...
Embodiment 1
[0096] In this embodiment, the method of using the micro-magnetic-controlled robot 100 is described in detail.
[0097] Patients fasted for 12 hours before lithotripsy to ensure an empty stomach. Before lithotripsy, the patient takes orally one or more micro-magnetic-controlled robots 100, and uses a B-ultrasound instrument to monitor the position of the micro-magnetic-controlled robots 100 after entering the human body. Using an external permanent magnet or a multi-degree-of-freedom magnetic control system to generate a guiding magnetic field, the micro-magnetic-controlled robot 100 is guided from the patient's stomach 402 to the gallbladder through the guiding magnetic field. When the micro-magnetic-controlled robot 100 reaches the gallbladder, the pulsed magnetic field generator 401 is used to generate a magnetic field with a magnetic field strength of about 2700Gs, and the frequency of magnetic field generation is 80 times per minute, so that the micro-magnetic-controlled ...
Embodiment 2
[0101] In this embodiment, the assembly method using the micro magnetic control robot 100 is described in detail.
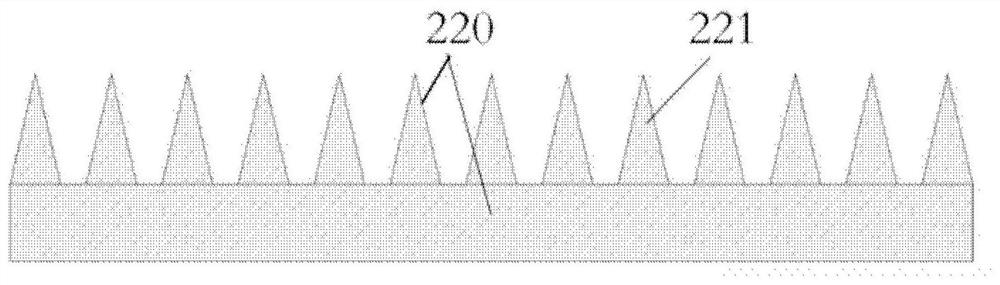
[0102] The flexible spiny functional film 220 taken out from the mold of the flexible spiny functional film 220 has a relatively large area, and a rectangular film with a size of 12.8×2mm and two pieces with a radius of 2.3mm and a center angle of 320° are cut from it. Fan-shaped film, the rectangular film is bonded to the magnetic composite spherical core 210 with a radius of 4mm to form a barrel, and the two fan-shaped films are respectively rolled into two conical sticks on both sides of the barrel surrounded by the rectangular film , after the bonding is completed, the micro-magnetic-controlled robot 100 is obtained. Since the micro-magnetic-controlled robot 100 is very small, the micro-magnetic-controlled robot 100 is approximately regarded as a sphere.
PUM
| Property | Measurement | Unit |
|---|---|---|
| diameter | aaaaa | aaaaa |
| diameter | aaaaa | aaaaa |
| diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com