


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Depth information acquisition method and system and terminal equipment
A technology of depth information and acquisition method, applied in the field of depth information acquisition method, system and terminal equipment, can solve the problems of long calculation time, depth information cannot be directly applied to the original image, high power consumption, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0035] This embodiment provides a method for acquiring depth information, which is applied to terminal devices including dual cameras, for example, mobile terminals such as mobile phones, tablet computers, personal digital assistants, AR (Augmented Reality, augmented reality technology) glasses, and can also be applied to mobile terminals with Computing equipment such as a PC (Personal Computer, personal computer) client, a self-service terminal, or a server connected by communication with the dual cameras.
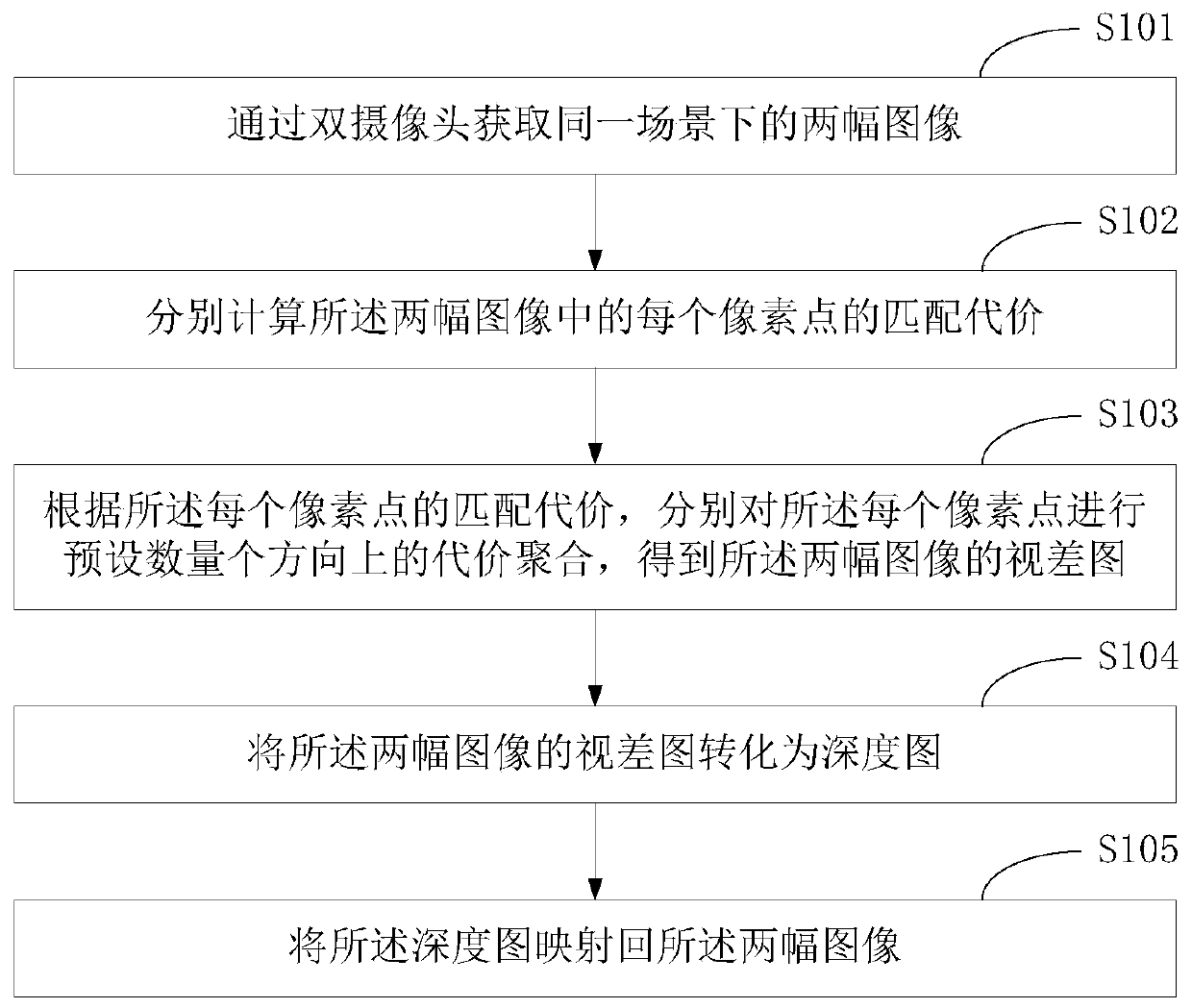
[0036] Such as figure 1 As shown, the depth information acquisition method provided in this embodiment includes:
[0037] Step S101, acquiring two images of the same scene through dual cameras.
[0038] In a specific application, the dual camera can be a symmetrical dual camera or an asymmetrical dual camera. The symmetrical type means that the parameters of the two cameras included in the dual camera are the same, and the asymmetrical type means that the parameters of t...
Embodiment 2
[0122] Such as Figure 10 As shown, this embodiment provides a depth information acquisition system 10, which is applied to a terminal device including dual cameras, and is used to execute the method steps in Embodiment 1. The system may be a terminal device processor or a software program in the processor system.
[0123] In a specific application, the processor may be a central processing unit (Central Processing Unit, CPU), and may also be other general-purpose processors, a digital signal processor (Digital Signal Processor, DSP), an application specific integrated circuit (Application Specific Integrated Circuit) , ASIC), off-the-shelf programmable gate array (Field-Programmable Gate Array, FPGA) or other programmable logic devices, discrete gate or transistor logic devices, discrete hardware components, etc. A general-purpose processor may be a microprocessor, or the processor may be any conventional processor, or the like.
[0124] The depth information acquisition sy...
Embodiment 3
[0138] Such as Figure 11 As shown, this embodiment provides a terminal device 11, which includes: a processor 110, a memory 111, and a computer program 112 stored in the memory 111 and operable on the processor 110, such as a depth information estimation program . When the processor 110 executes the computer program 112, it realizes the steps in the above embodiments of the depth information acquisition method, for example figure 1 Steps S101 to S105 are shown. Alternatively, when the processor 110 executes the computer program 112, the functions of the modules in the above-mentioned device embodiments are realized, for example Figure 10 The functions of modules 101 to 105 are shown.
[0139] Exemplarily, the computer program 112 can be divided into one or more modules, and the one or more modules are stored in the memory 111 and executed by the processor 110 to complete the present invention. The one or more modules may be a series of computer program instruction segmen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com