A multi-robot comprehensive obstacle avoidance method using pilot following method
A technology of following robots and multi-robots, applied in the direction of instruments, two-dimensional position/channel control, control/regulation systems, etc., can solve problems such as no obstacle avoidance strategy, large formation damage, and no consideration of the overall formation. , to achieve the effect of reducing spacing and relative angles and maintaining formation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
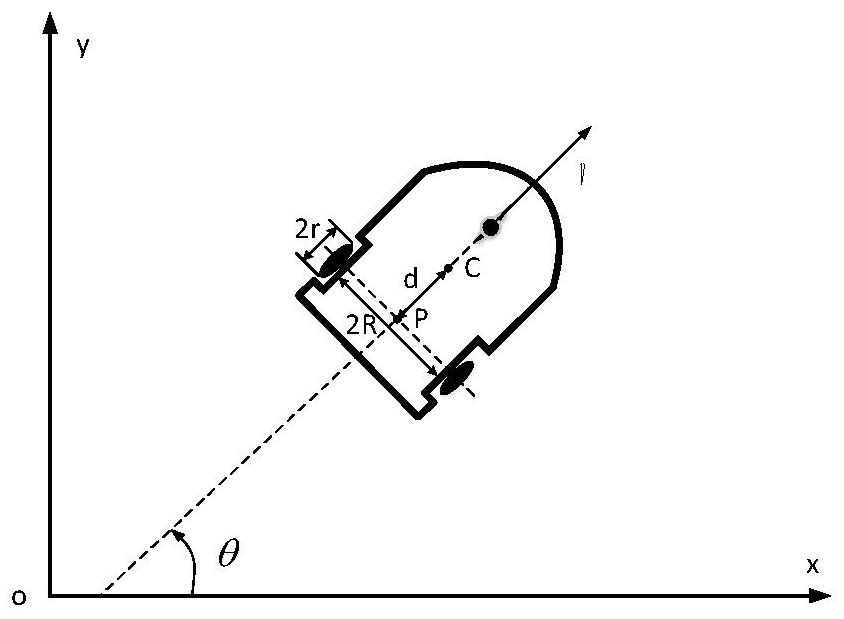
[0144] The mobile robot platform adopted in this embodiment is as follows: figure 2 The relevant parameters are shown in Table 1:
[0145] Table 1: Parameters related to mobile robot platform
[0146]
[0147]
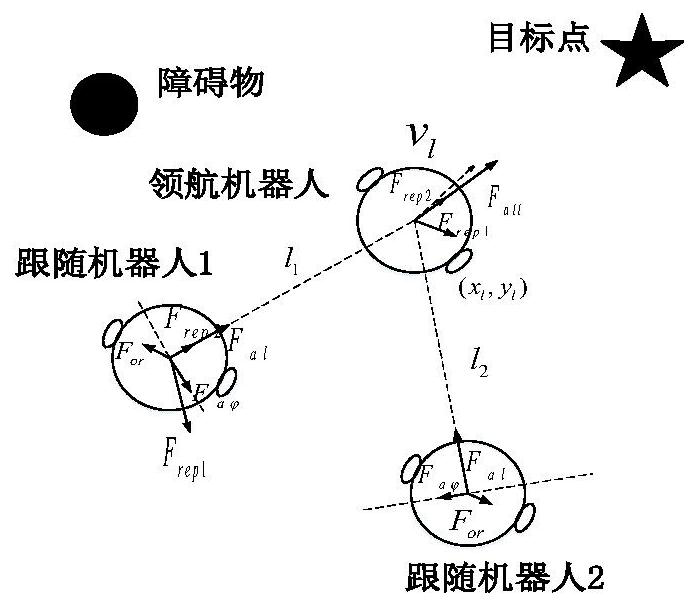
[0148] In this embodiment, a pilot robot and two follower robots are used to form a triangular formation. Set the speed of the leading robot to 1m / s and the maximum speed of the follower robot to be 2m / s. The distance between the pilot robot and the follower robot 1 is 1.5m, the relative angle is 135°, the distance between the lead robot and the follower robot 2 is 1.5m, the relative angle is 225°, and the robot is a wheeled robot with a diameter of 30cm. The initial coordinates of the pilot robot are (0.5, 0.5), the coordinates of the target point are (6, 0.6), the initial coordinates of the following robot 1 are (-0.5, 1.5), and the initial coordinates of the following robot 2 are (-0.5, -0.5).
[0149] Three scenarios are set up: (1) Avoid obstacles in an en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com