Double-observer cooperative passive positioning method and system
A technology of passive positioning and observation, applied in the direction of radio wave measurement systems, positioning, measuring devices, etc., can solve problems such as being easy to be found, achieve strong stability and adaptability, ensure passive positioning accuracy, and prevent target models from being inaccurate The effect of matching problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
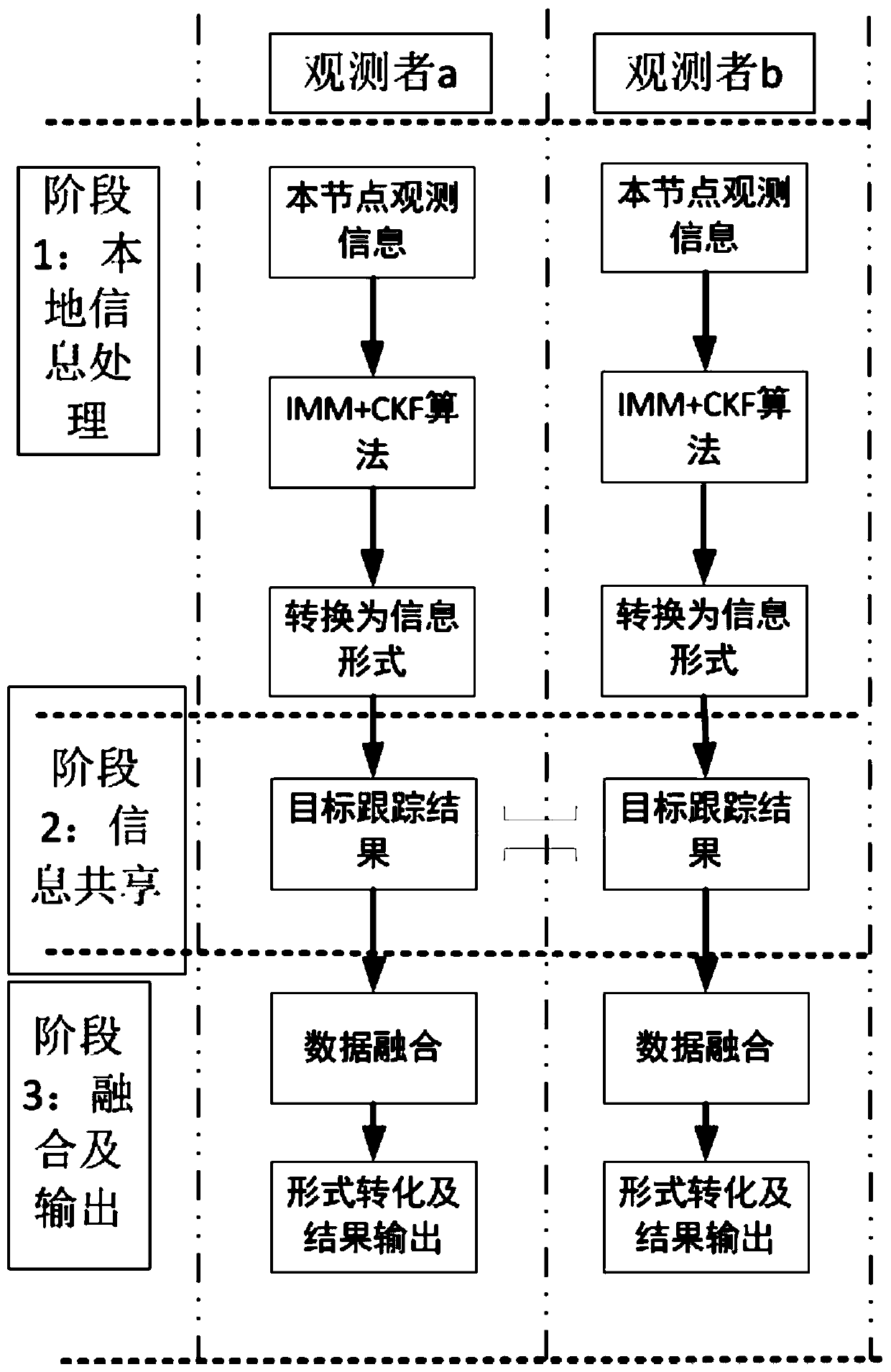
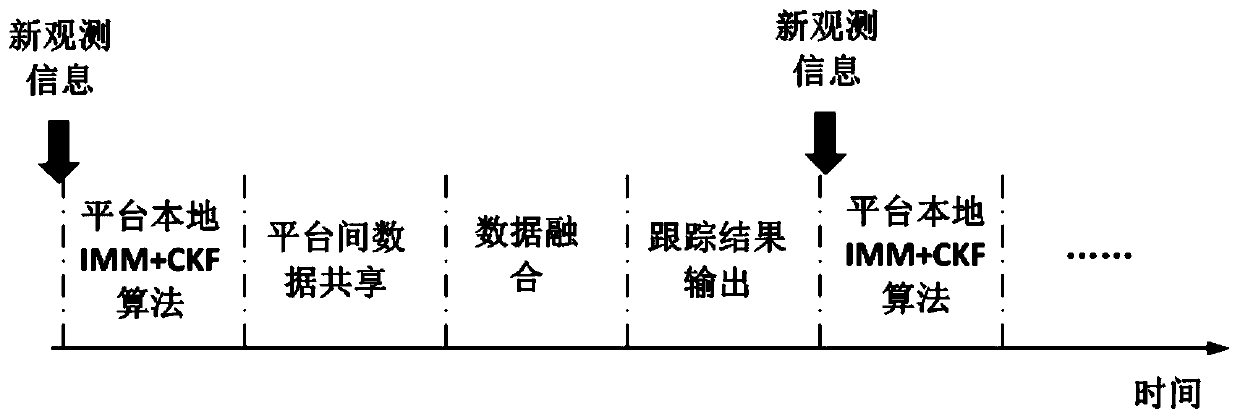
[0058] The overall flowchart of the algorithm is as follows: figure 1 shown. The system sequence diagram is as follows figure 2 shown.
[0059] The specific process includes the following steps:
[0060] Step 1: Each observer uses the IMM algorithm + CKF (Cubature Kalman filter, volumetric Kalman filter) according to the target information sensitive to its own sensor (the relative angle between the observer and the target (pitch angle and azimuth angle)). The algorithm performs target tracking estimation independently, obtains the target tracking estimation result of the platform, and converts the target tracking result into information form.
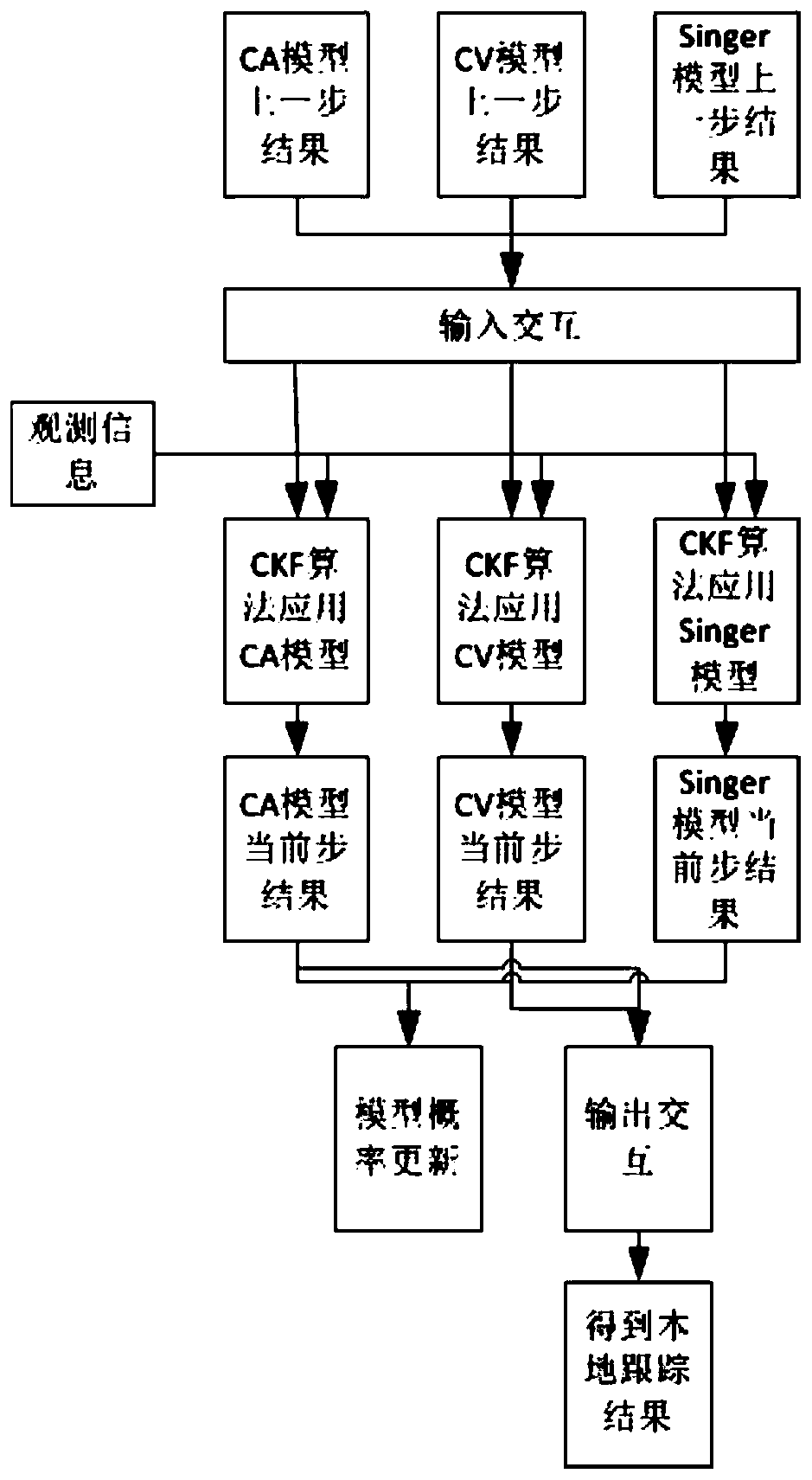
[0061] For the convenience of the following introduction, two observers are defined as observer a and observer b. This part mainly introduces "IMM algorithm + CKF algorithm". The calculation flow chart of this algorithm is as follows image 3 shown, refer to image 3 , the specific calculation process of the algorithm is as follow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com