Low-speed unmanned aerial vehicle air-based recovery system based on mechanical smart gripper type system
A recycling system, UAV technology, applied in aircraft parts, control of finding targets, ground devices, etc., can solve problems such as low recycling efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
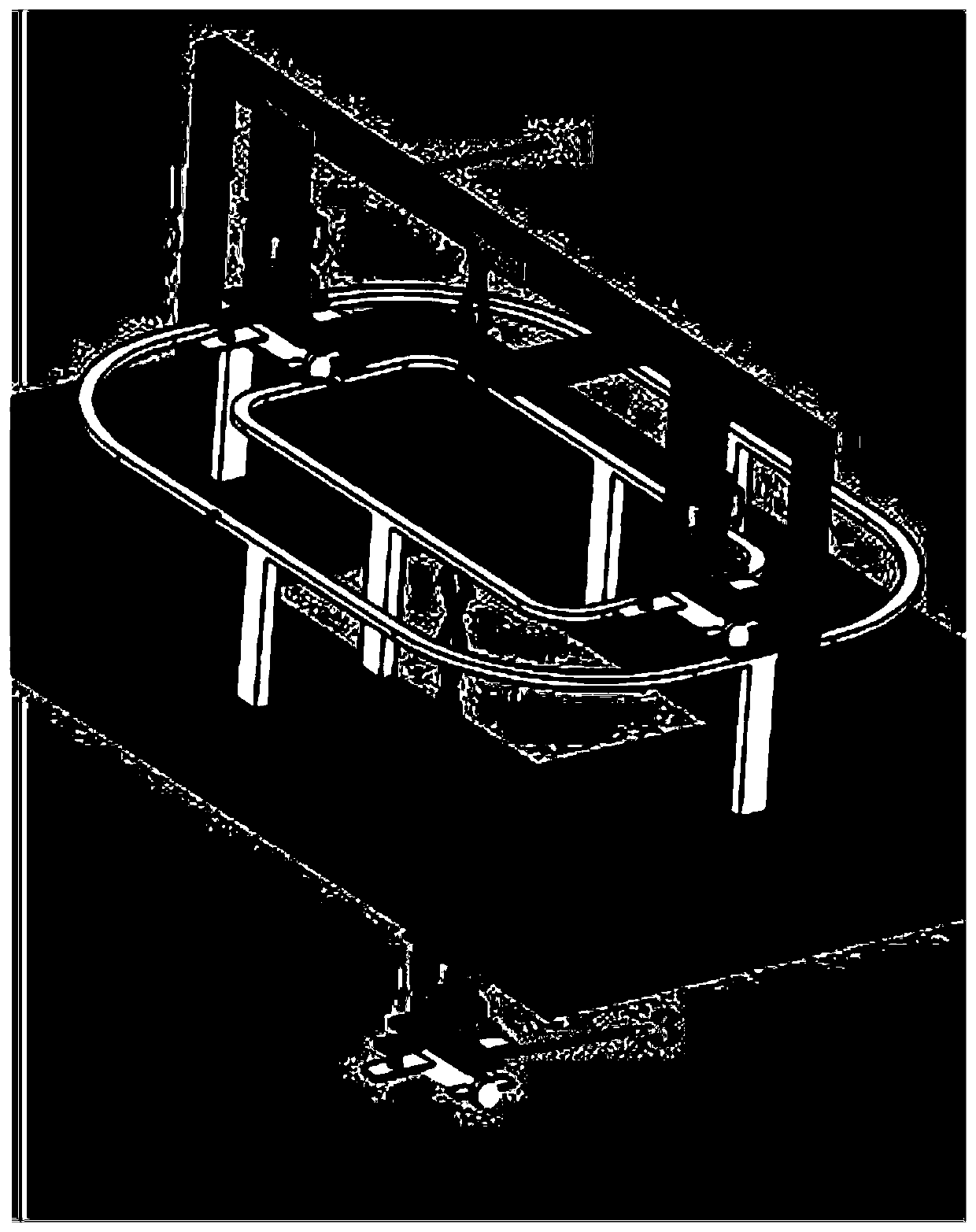
[0088] Specific implementation mode one: refer to figure 1 Describe this embodiment in detail. The low-speed unmanned aerial vehicle air-based recovery system based on the mechanical dexterous gripper system described in this embodiment includes: a double-column truss robot subsystem, a circulating material warehouse subsystem, and a mechanical dexterous gripper subsystem. , visual navigation subsystem and recycling control subsystem;
[0089] The double-column truss robot subsystem and the mechanical dexterous gripper subsystem are used to capture the drone;
[0090] The circulation warehouse subsystem is used for the recovery and stacking of unmanned aerial vehicles in the cabin of the carrier aircraft;
[0091] The visual navigation subsystem is used to obtain the measurement data of the visual sensor, and obtain the navigation data required by the flight control system according to the data;
[0092] The recovery control subsystem is used to control the flight attitude a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com