System suitable for driverless decision learning and training
An unmanned and decision-making technology, applied in the field of unmanned decision-making learning and training systems, can solve problems such as high cost, little help, low efficiency, etc., to reduce resources and costs, save costs, and promote convergence speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
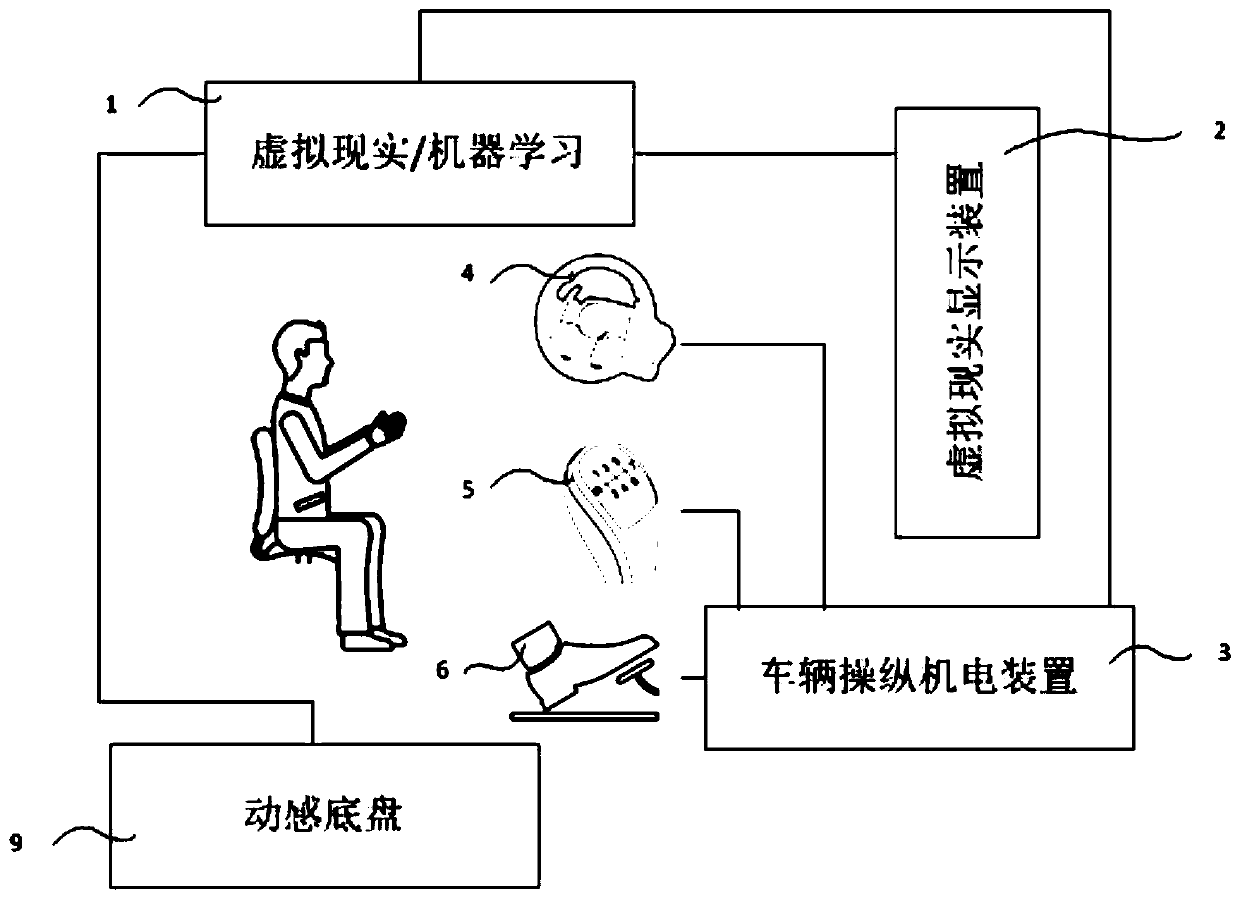
[0058] A server with a GPU graphics accelerator is connected to a computer display screen, and the vehicle simulation system can be composed of commercially available analog steering wheel 4, gear position 5, and brake / throttle 6 modules. Use 3D modeling tools to generate various road scenes, let an experienced driver operate the vehicle simulation module in the generated simulation scene, and send the output information of each vehicle simulation module to the server in real time, and the server will send the current road parameters in the simulation scene etc. correspond to the driver's operating parameters, and are used as input training samples of the machine learning algorithm sub-module 7 built in the server to learn and train the algorithm module.
Embodiment 2
[0060] Two computers are used to form a distributed computing system based on LAN, one of which is used as the main control computer for virtual reality simulation driving, and its corresponding display is a head-mounted VR display device to display various road conditions. The control computer controls a three-axis dynamic chassis 9 to simulate the movement of the vehicle under various road conditions, allowing the driver to obtain a realistic driving experience; the other computer is used as the main processor of the machine learning algorithm sub-module 7 to accept simulated driving The operating parameters, as well as various road condition parameters sent by the main control computer of the virtual reality simulation driving, these parameters are used as the input training samples of the machine to learn and train the algorithm module.
Embodiment 3
[0062] Two servers are used to form a distributed system based on high-speed LAN. One of the servers is used as the main control computer for virtual reality simulation driving, and its corresponding display is a head-mounted VR display device to display various road conditions. At the same time, the The main control computer controls a six-axis dynamic chassis 9 to simulate the movement of the vehicle under various road conditions, allowing the driver to obtain a realistic driving experience; another server with a GPU accelerator card is used as the machine learning algorithm sub-module 7 The main processor accepts the operating parameters of the simulated driving and various road condition parameters sent by the main control computer of the virtual reality simulated driving, takes these parameters as the input training samples of the deep neural network, and uses certain evaluation indicators to evaluate each The driving result is evaluated, and the evaluation result is also ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com