Singularity treatment method for six-degree-of-freedom articulated robot
A processing method and robot technology, applied in the field of singularity processing, can solve the problems of increased joint speed of the robot, shutdown, safety problems, etc., and achieve the effects of simple method, high operability, and improved operation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
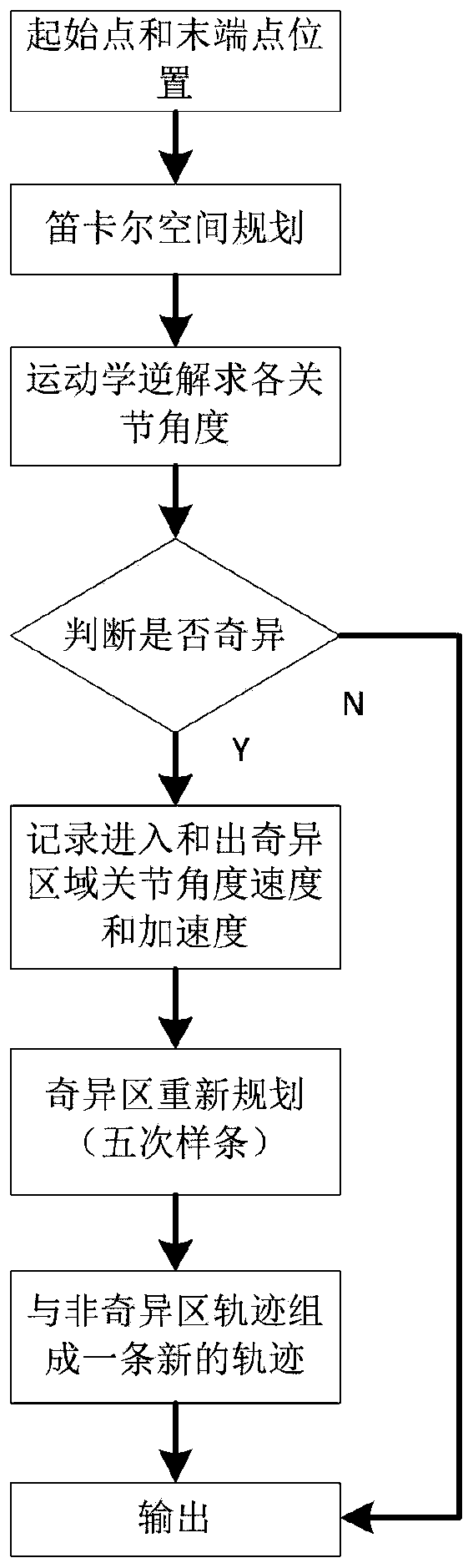
[0077] When the starting point p1 and the end point p2 of the robot motion are given, the singularity processing method proceeds as follows:
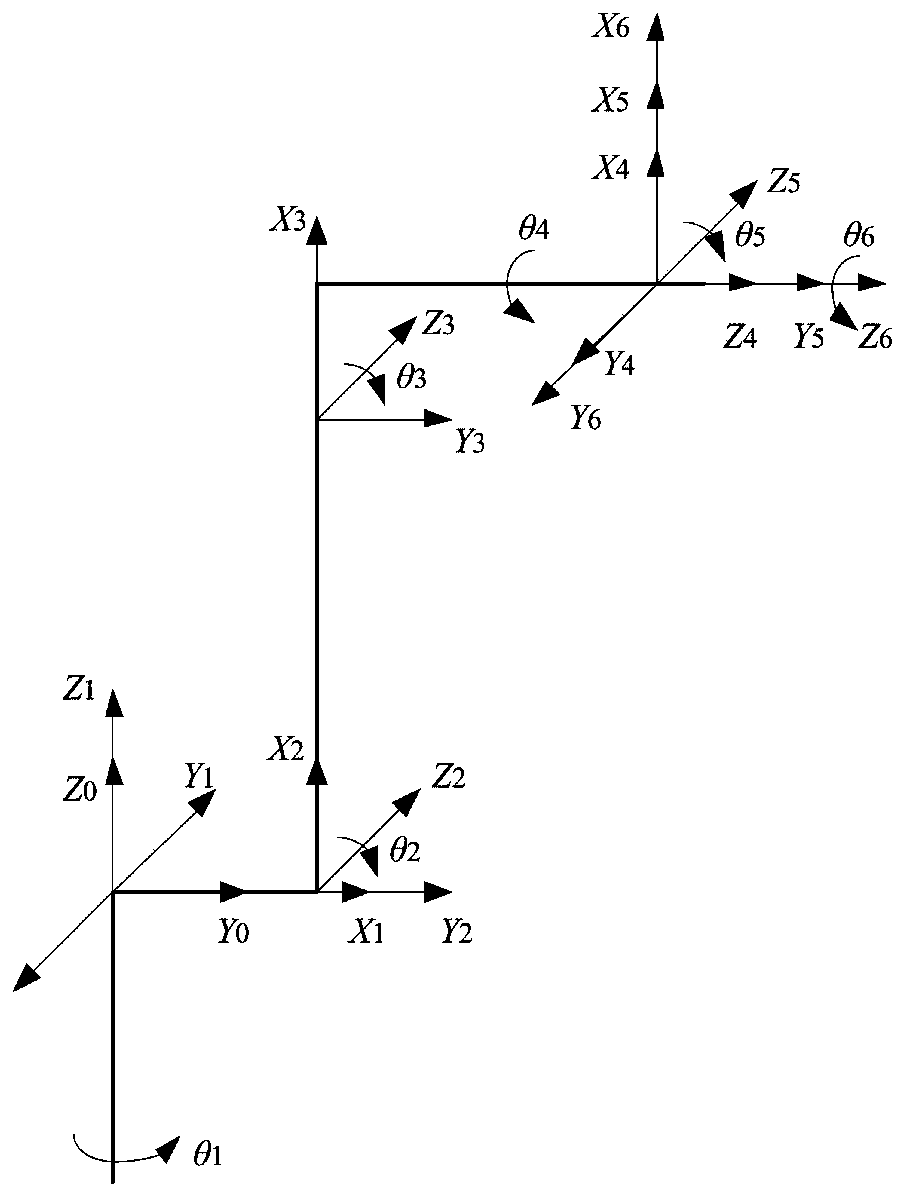
[0078] Step 1. Use the D-H coordinate system to establish a kinematic model, and perform kinematic forward and inverse solutions.
[0079] Step 2. Perform Cartesian space trajectory planning, the interpolation period is 0.05s, and the total time is 5s.
[0080] Step 3. Carry out kinematic inverse solution for each interpolation point, and obtain each joint angle, angular velocity and angular acceleration.
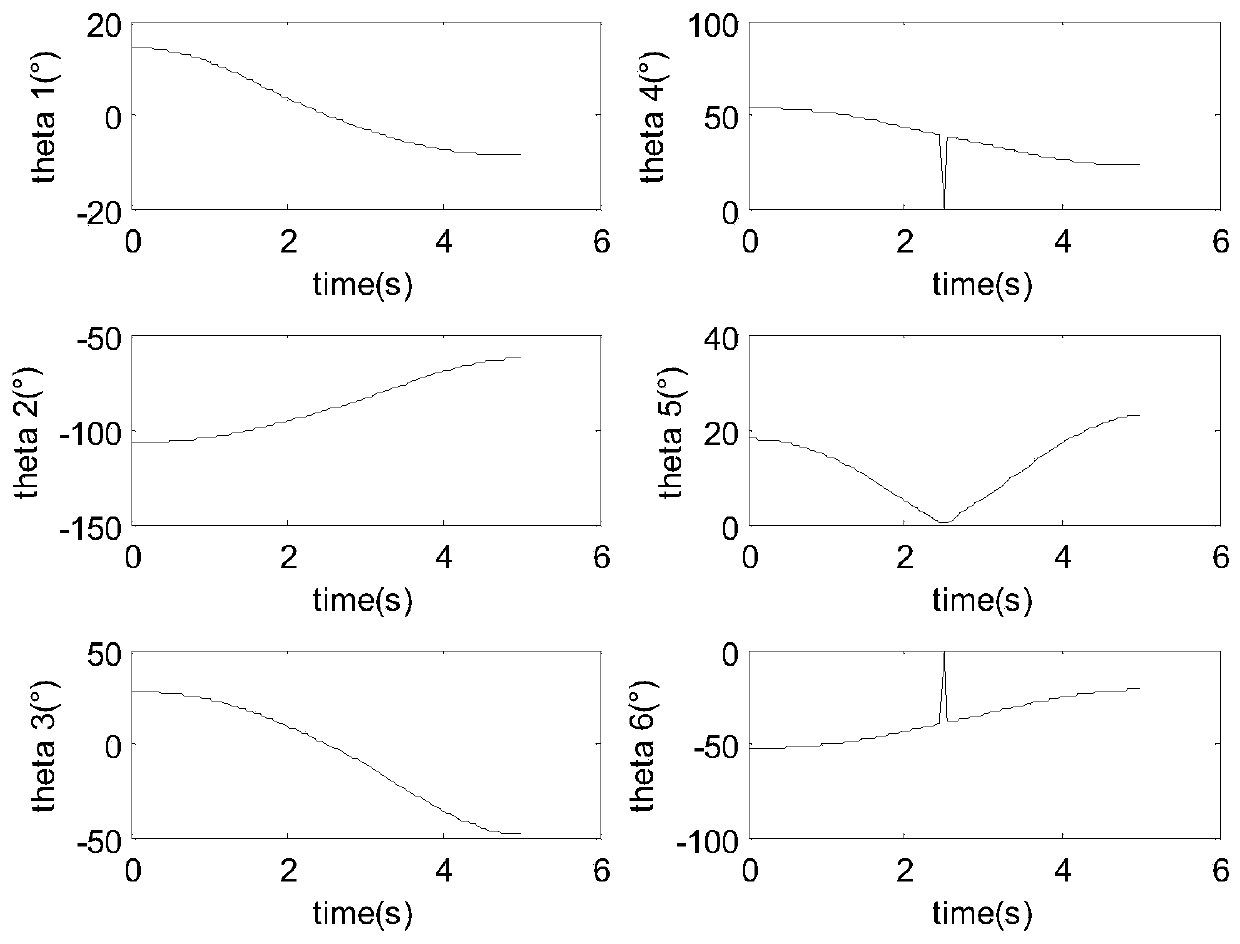
[0081] Step 4. Use the singularity criterion to determine whether the interpolation point is in the singularity region, Figure 3a , Figure 3b and Figure 3cIt is the trajectory of the joint space without singularity processing. From the figure, we can see the changes of the angle, angular velocity and angular acceleration of each joint of the robot. produce mutations.
[0082] Step 5. Record the angle, angular velocity, and an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com