Novel method for self-coupling PID cooperative control theory
A technology of collaborative control and new method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of inconvenient operation and failure of speed factor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] 1. Mapping ideas from unknown nonlinear time-varying systems to unknown linear systems
[0037] 1) Problem background
[0038] Suppose a second-order unknown nonlinear time-varying system is:
[0039]
[0040] Among them, y 1 ,y 2 are the two states of the system, u and y are the control input and actual output of the system respectively, f(y 1 ,y 2 ) is the unknown smooth function of the system, b(t) is the time-varying gain of the control channel, and d is the external bounded disturbance.
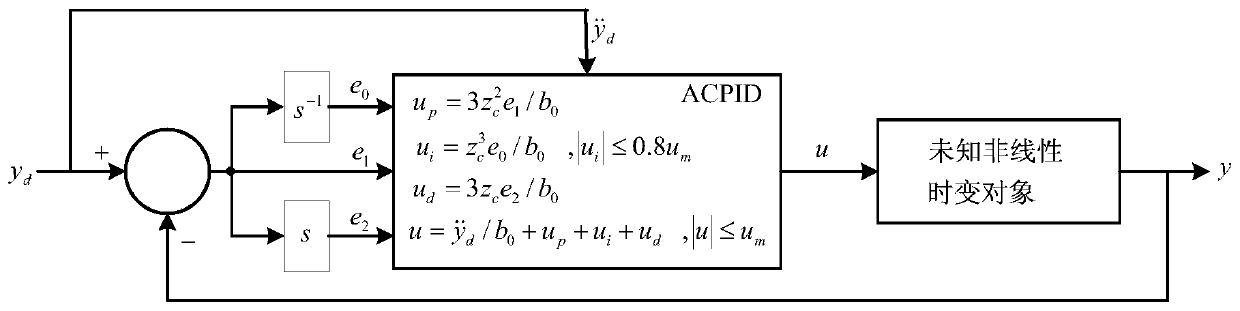
[0041] Definition 1. Let b(t)=b 0 +△b, and b 0 ≠0 is the estimated value within the variation range of the time-varying gain b(t) of the control channel (accurate is not required), if all the unknown uncertain complex factors of the unknown nonlinear time-varying system (1) are used in a lumped state, that is, the sum disturbance the y 3 to express, then the sum disturbance y can be defined 3 (also known as the expanded state) is:
[0042] the y 3 =f(y 1 ,y 2 )+d+△bu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com