Peripheral target vehicle state estimation method based on vehicle-to-vehicle communication and GMPHD filtering
A target vehicle and state estimation technology, which is applied to the re-radiation of electromagnetic waves, radio wave measurement systems, and the use of re-radiation, etc., can solve the problem of limiting the environmental perception ability of smart cars, the correlation errors are easy to affect each other, and it is difficult for multiple target vehicles to continue. Accurate tracking and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0085] Embodiments will be described in detail below with reference to the accompanying drawings.
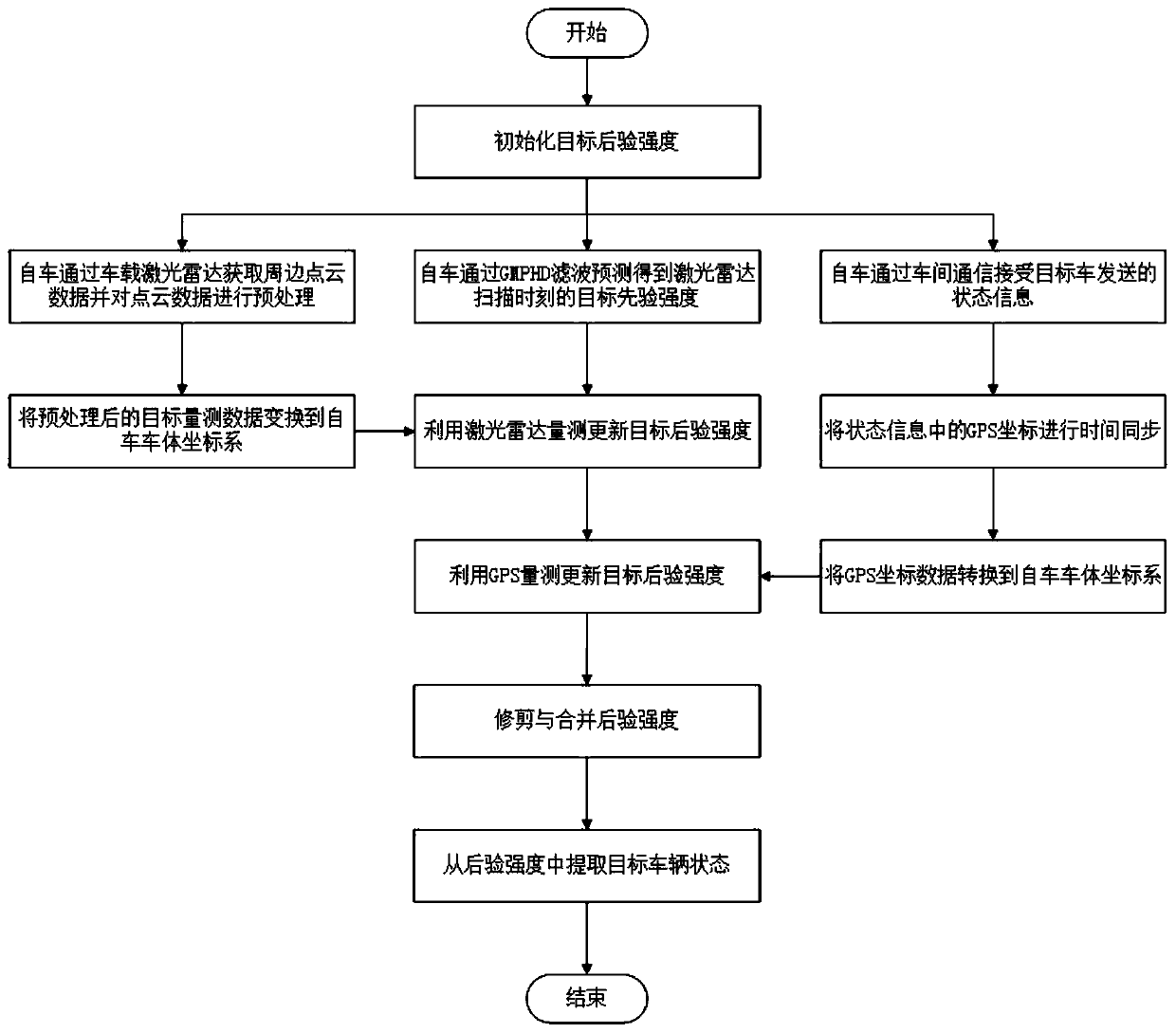
[0086] As shown in the figure, a method for estimating the state of surrounding target vehicles based on vehicle-to-vehicle communication and GMPHD filtering, the key technical steps of the method are as follows:
[0087] Step 1: At time k=0, initialize the target Gaussian mixture posterior strength as in is a Gaussian distribution, where is the target state, o x ,o y is the coordinate of the target vehicle in the body coordinate system of the vehicle, v and a are the velocity and acceleration respectively; is the initial mean value, is the initial covariance matrix; J k , are the number and weight of Gaussian components, respectively.
[0088] Step 2: At time k+1, the self-vehicle obtains the lidar point cloud data through the on-board lidar sensor;
[0089] Step 3: Filter the point cloud data to remove hash points and isolated points, then segment and fit the po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com