Unmanned aerial vehicle garage capable of accurately recovering and guarding
A technology for unmanned aerial vehicles and hangars, which is applied in the field of unmanned aerial vehicles and can solve the problems of incomplete autonomous storage tasks and other problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
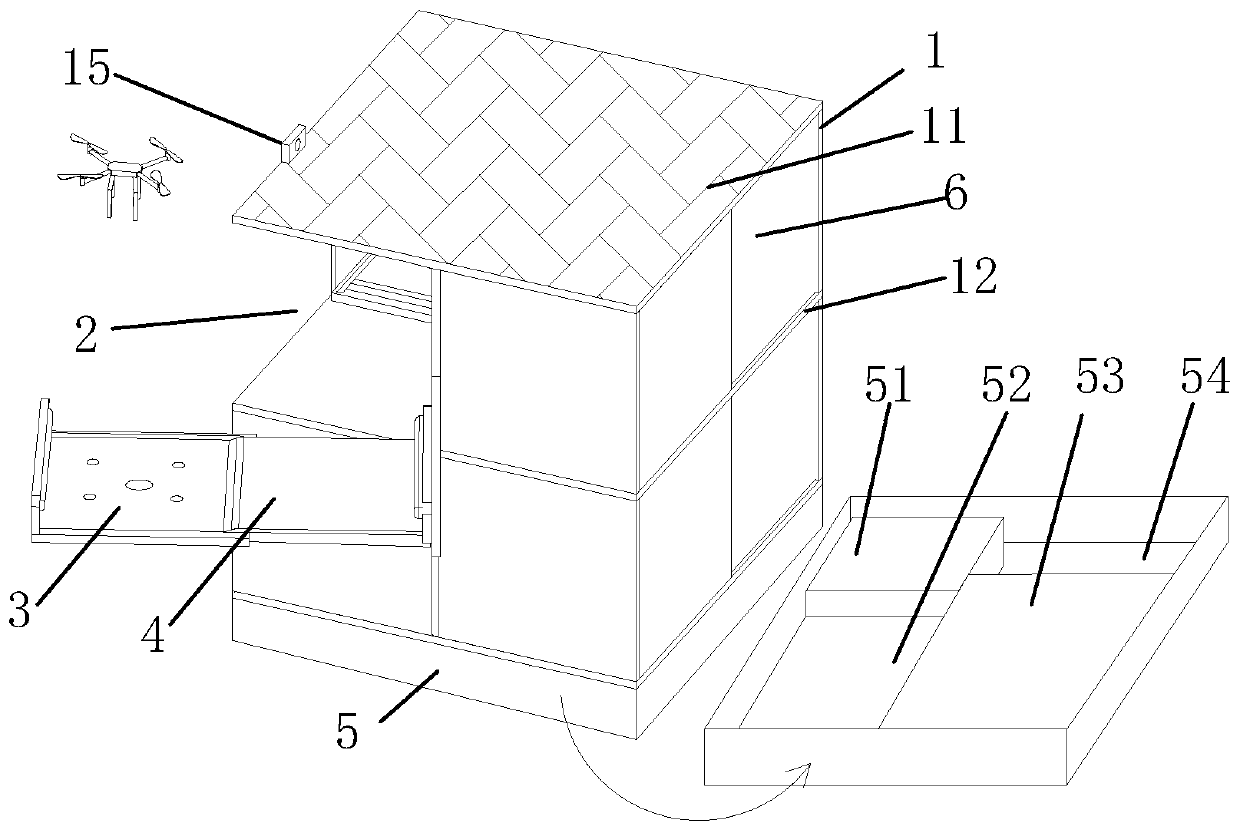
[0036] Such as Figure 1-6 As shown, a hangar for precise recovery of on-duty drones is composed of a top solar panel cover 11, hangar outer doorposts 9, left and right sliding doors 6, multiple parking rooms 2, and a bottom control room 5. The top solar cells A meteorological data acquisition device 15 is installed on the plate cover 11;
[0037]The drone hangar 1 includes a plurality of hangars 2, which can be arranged in a single layer or multiple layers according to actual needs. The hangars on each floor are separated by partitions 12 in the hangar, and four independent Each parking room 2 works independently and the number of parking rooms 2 can be adjusted according to actual needs; each parking room 2 can simultaneously take off and land two drones at a time, that is, the drone The number of unmanned aerial vehicles that take off and land at the same time in warehouse 1 is one-half of the total number of parking rooms; The front and rear side doors of the man-machine...
Embodiment 2
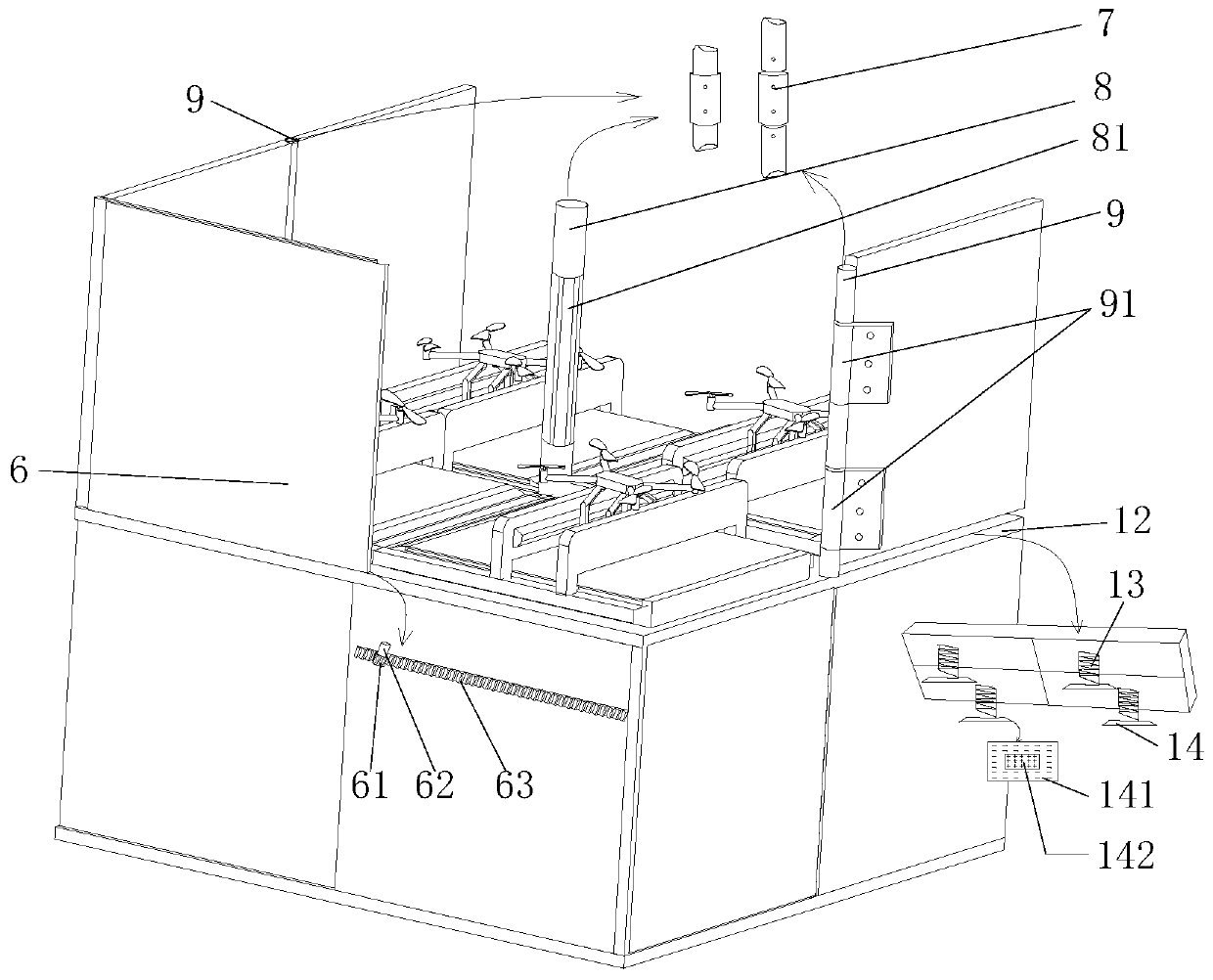
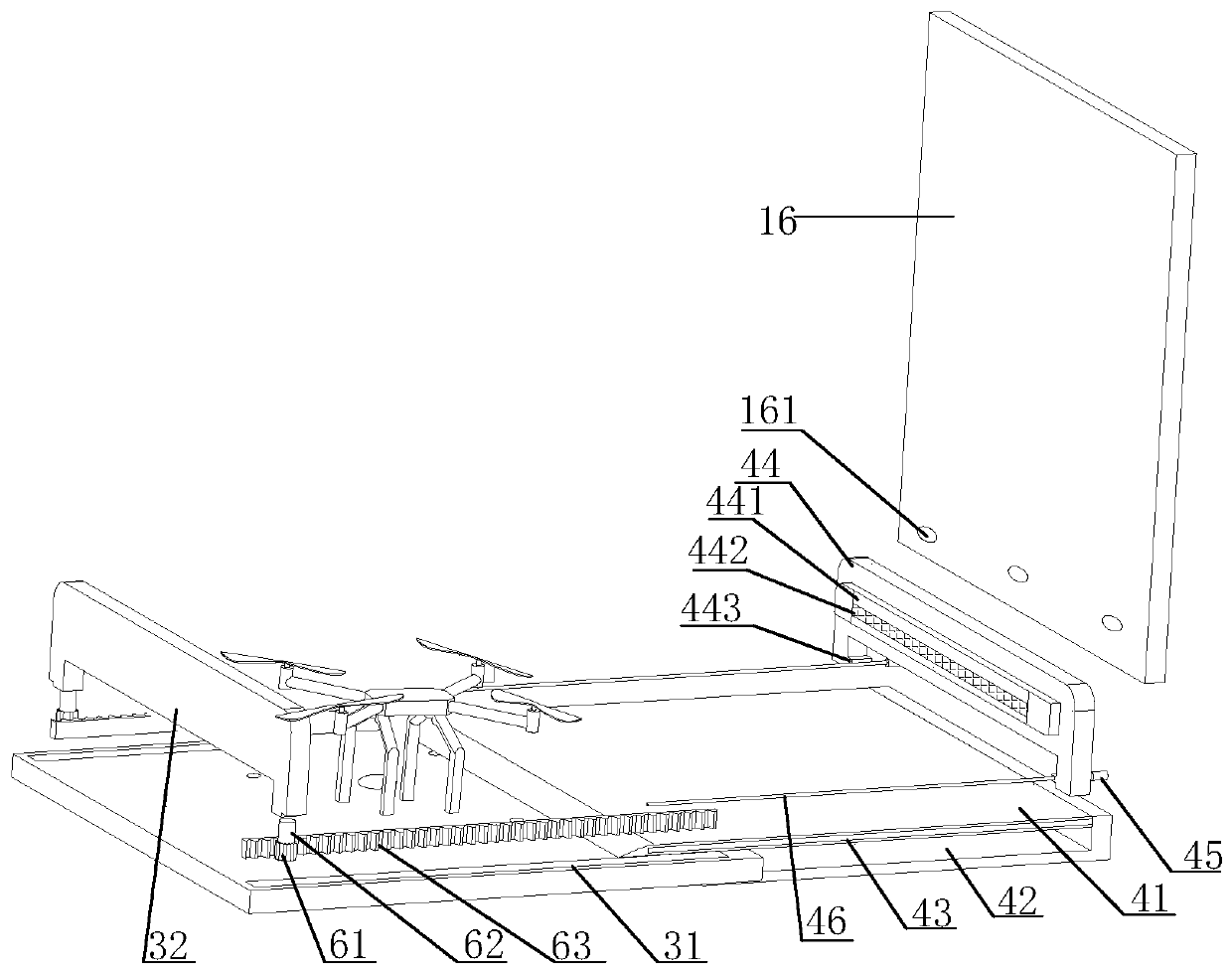
[0050] This embodiment is exactly the same as the structural setting of the precisely recovered and guarded UAV hangar in Embodiment 1, except that the way of charging the UAV is different. When the automatic charger 442 on the multifunctional limiter 44 is detected by the integrated controller 51 to be abnormal and cannot normally charge the UAV, the hangar 1 uses a backup charging method to charge the UAV. A spring relay 13 and a backup charger 14 are installed on the partition 12 and the bottom surface 11 of the top solar panel cover, and the backup charger negative pole 141 and the backup charger positive pole 142 installed on the backup charger 14 are connected to the backup charger on the top of the drone The power receiving sheet 47 charges the drone, and the charging method is contact charging. When the UAV lands smoothly and the mobile apron 3 moves to its own limit, the doorpost rotating motor 91 starts, driving the fixed apron 4 to rotate into the inside of the hang...
Embodiment 3
[0052] The difference between this embodiment and Embodiment 1 is that, on the basis of Embodiment 1, a constant temperature module 81 is installed on the outer wall of the central doorpost 8 of the hangar, and the rest of the structural settings and usage methods are the same as Embodiment 1. The constant temperature module 81 of this embodiment selects the hangar micro-air conditioner improved based on the TCL air-conditioning fan refrigerator. When the UAV is accurately recovered into the hangar 1 and the hangar 1 is completely closed, the environmental controller 54 inside the hangar 1 is activated to detect the environmental index inside the hangar 1, and at the same time transmit the detected data to the integrated controller 51. The integrated controller 51 compares the current data with the properly stored temperature values of the core components inside the UAV, and judges whether the hangar constant temperature module 81 needs to be activated. When the temperature ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com