Combined navigation method applicable to unmanned aerial vehicle in glide landing stage
An integrated navigation and unmanned aerial vehicle technology, applied in the field of integrated navigation, can solve the problems such as the receiver is not easy to capture and track the satellite carrier signal, the inertial navigation system is not suitable for long-distance navigation, and the accumulation of positioning errors, etc. Inexpensive, reliability-enhancing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
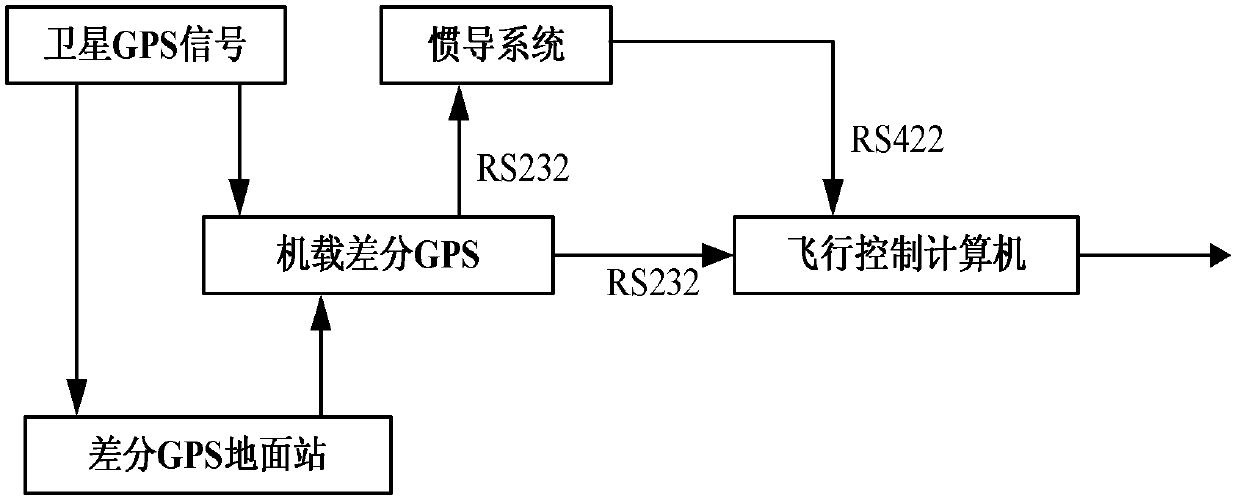
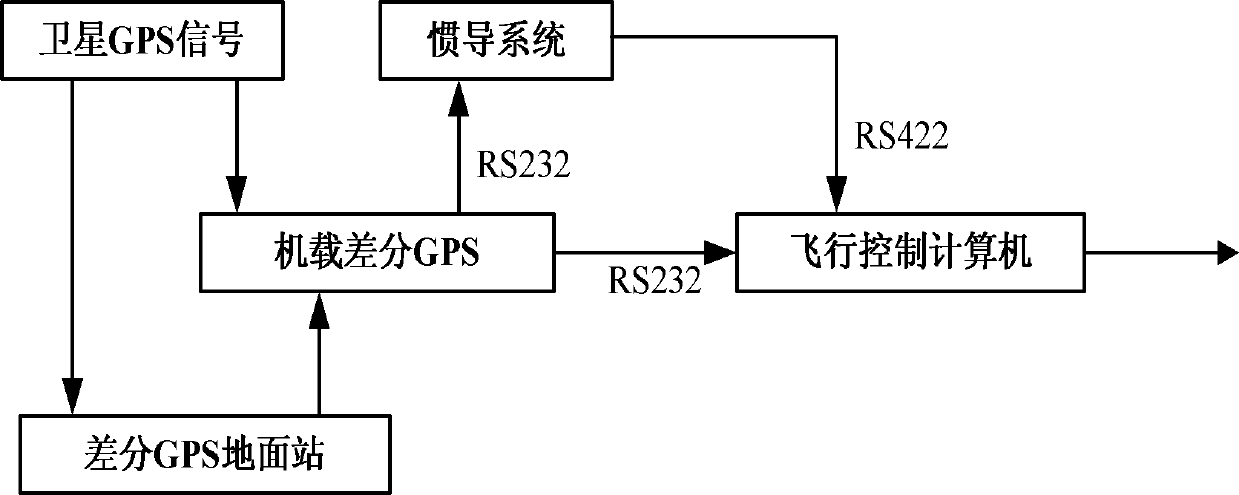
[0016] refer to figure 1 . Combined with a certain type of unmanned aerial vehicle, the specific implementation of the differential GPS / INS integrated navigation system is introduced. A set of airborne differential GPS system, a set of completely autonomous inertial navigation system and a flight control computer are installed on a certain type of UAV. These three parts form a closed loop. A set of differential GPS ground stations together form a differential GPS / INS integrated navigation system. The differential GPS system consists of two parts: the GPS airborne differential station installed on the UAV and the differential GPS ground station set at the reference point of the airport runway. The accuracy of the differential GPS system can reach 1m. The steps for realizing the invention include:
[0017] (1) Select a reference data point on the airport runway where the UAV takes off or taxis, and use a high-precision maritime satellite locator whose measurement accuracy can...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com