A control system applied to intelligent inspection robot
An inspection robot and intelligent inspection technology are applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., which can solve problems such as numerous components, difficult control of software system complexity, and complex correlations, and achieve good control effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
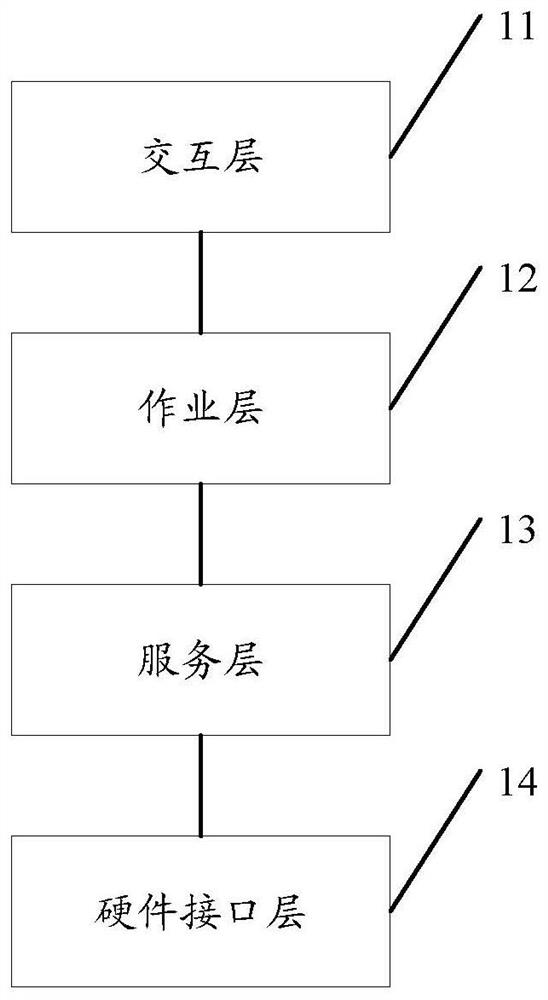
[0039] see figure 1 , figure 1 It is a schematic diagram of the structural composition of the control system applied to the intelligent inspection robot in the embodiment of the present invention.
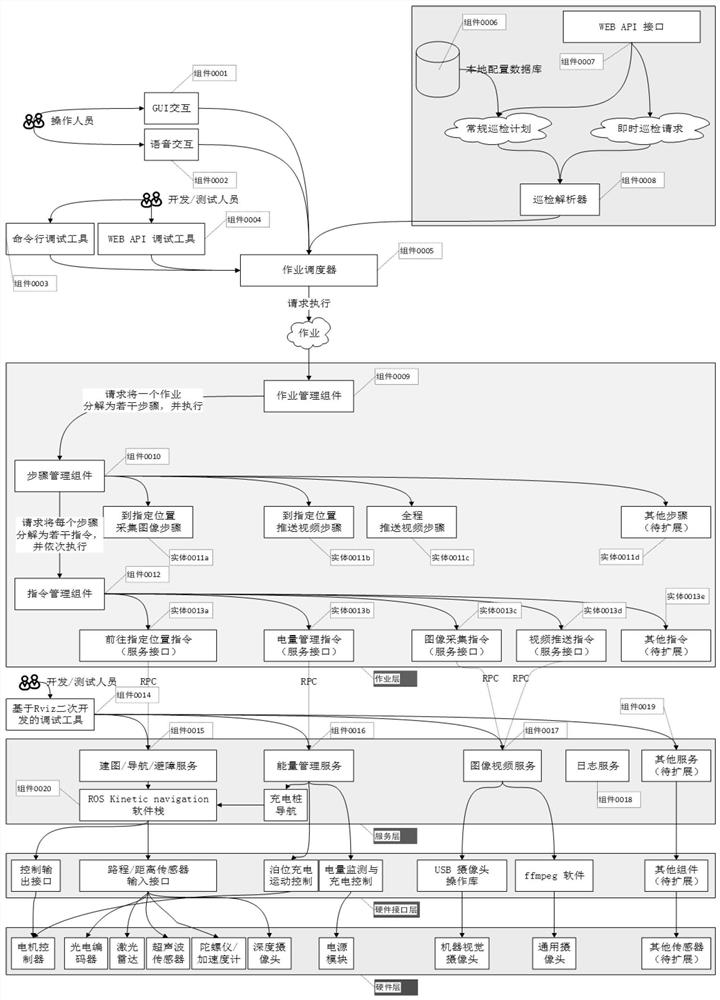
[0040] Such as figure 1 As shown, a control system applied to an intelligent inspection robot, the system includes:
[0041] Interaction layer 11: used to receive an external or internal inspection request for controlling an intelligent inspection robot, and generate an inspection job in the job scheduler based on the inspection request, and the inspection job includes the inspection request;
[0042] In the specific implementation process of the present invention, the interaction layer 11 includes: an operation interaction module: used to receive the inspection request of the operating user to control the intelligent inspection robot based on the image user interface interaction or voice interaction; the test interaction module: used to Command debugging tool, WEB API debugging...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com