Spacecraft rendezvous fault diagnosis and filter design method based on event driving
A filter design and event-driven technology, which is applied in the fields of instrumentation, computing, and electrical digital data processing, etc., can solve the problems of high energy consumption in data transmission and high bus bandwidth occupancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0032] Specific implementation mode 1: The specific process of the event-driven spacecraft rendezvous fault diagnosis and filter design method in this implementation mode is as follows:
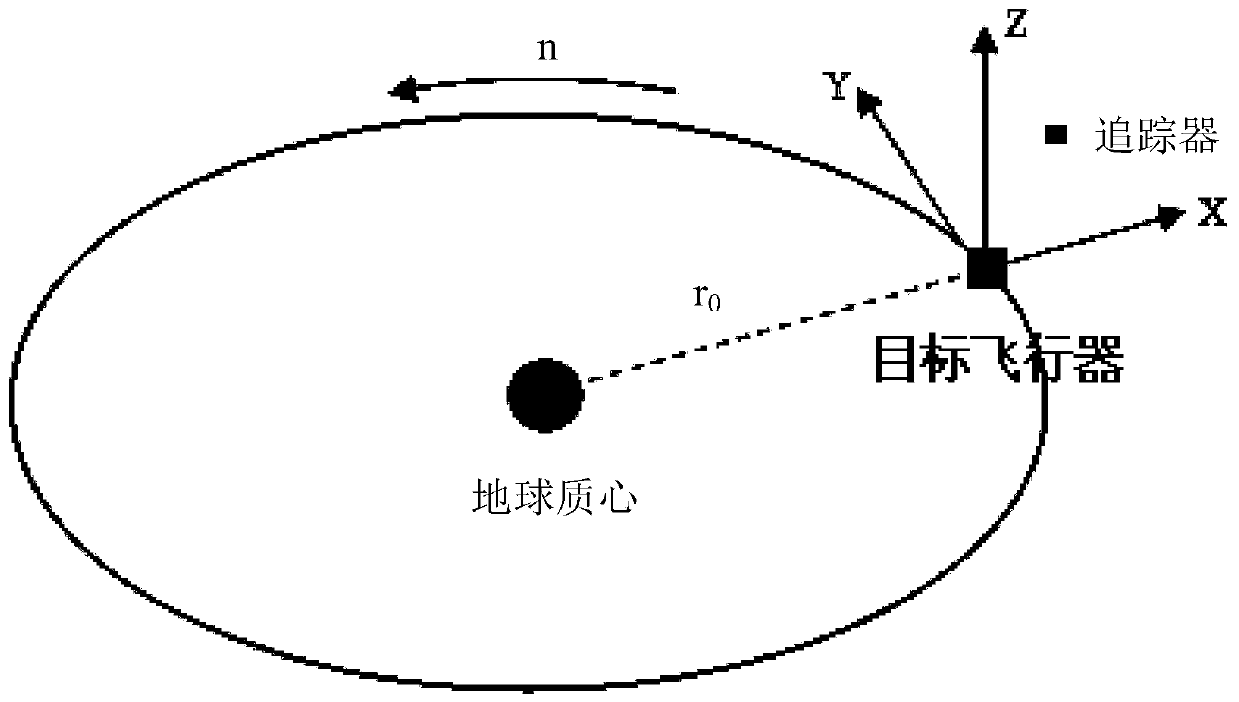
[0033] Step 1. The orbital coordinate system of the tracker and the target spacecraft is as follows: figure 1 As shown, according to Newton's dynamics theory, the C-W equation is established, and the state-space model of the spacecraft rendezvous system is established according to the kinematic equation;
[0034] Step 2, designing a weighted fault function to improve fault diagnosis performance;
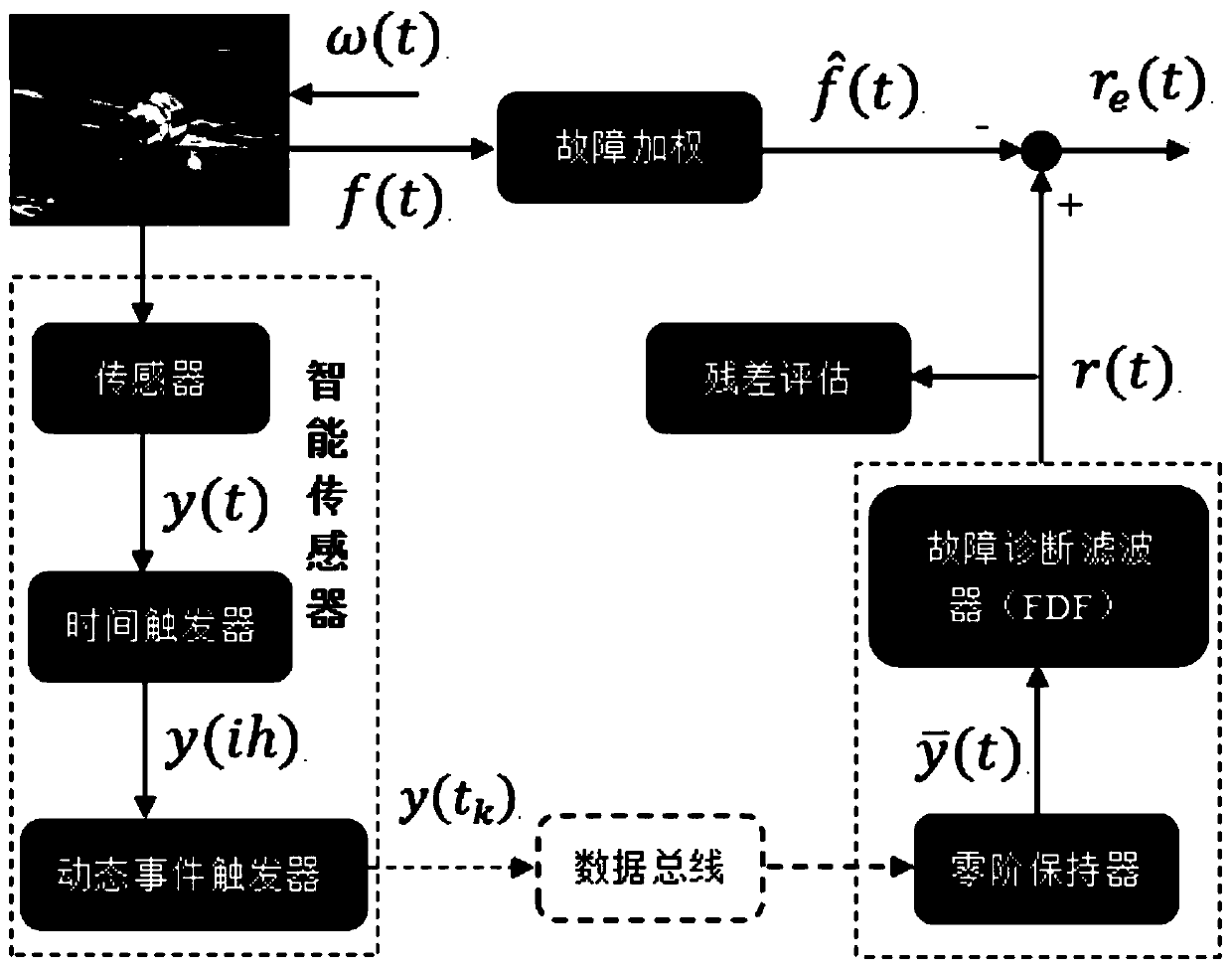
[0035] Step 3. Based on the state space model of the spacecraft rendezvous system established in step 1, design a gain matrix based on dynamic event-driven FDF, and establish an augmented residual system under event-driven conditions;
[0036] Step 4. According to the gain matrix of FDF, get and x(t), then according to And u(t)=Kx(t), get residual signal r(t) and control input u(t);
[0037] ...
specific Embodiment approach 2
[0042] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that the orbital coordinate system between the tracker and the target spacecraft in the step 1 is as follows figure 1 As shown, according to the Newtonian dynamics theory, the C-W equation is established, and the state-space model of the spacecraft rendezvous system is established according to the kinematic equation; the specific process is:
[0043] According to Newton's dynamics theorem, the relative dynamics model of the spacecraft is as follows:
[0044]
[0045]
[0046]
[0047] Among them, x, y, z are the relative position components in the satellite orbit coordinate system; Respectively, the relative velocity components of the x-axis, y-axis, and z-axis of the satellite orbit coordinate system; r 0 is the center distance of the target aircraft; μ e is the gravitational constant of the earth; n is the orbital angular velocity of the target aircraft, equal to ...
specific Embodiment approach 3
[0058] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that the spacecraft rendezvous system matrix A 0 , B 0 , B 1 , the C expression is as follows:
[0059]
[0060]
[0061] Other steps and parameters are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com