Method and system for UAV visual landing based on 5G network
A drone and vision technology, applied in the field of drone visual navigation, can solve problems such as control errors, inaccurate landing positions, inaccurate positioning, etc., and achieve the effect of reducing transmission delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
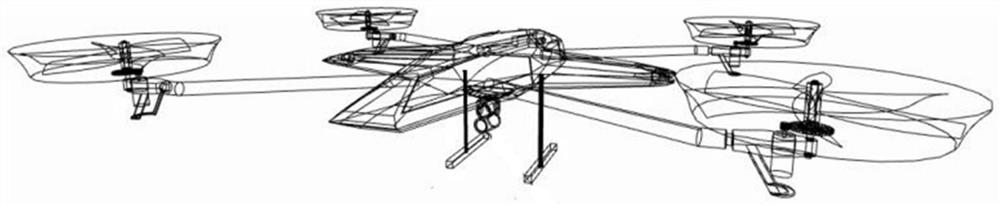
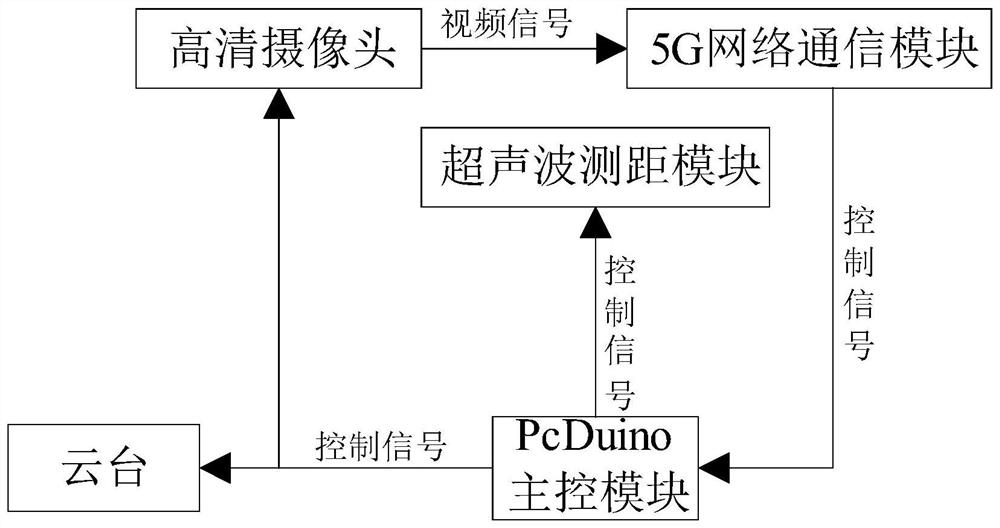
[0078] like figure 1 , figure 2 As shown, this embodiment provides a 5G network-based UAV visual landing system, including: UAV-side system and ground-side system,
[0079] The UAV-side system includes: a lithium battery, a pcduino main control module, a high-definition camera, a 5G network communication module at the UAV-side, and an ultrasonic ranging module. The lithium battery is used to supply power to the UAV; the pcduino The main control module is used to receive the control command of the ground terminal system, and control the work of the relevant modules on the drone terminal system; the high-definition camera is used to shoot high-definition images or videos; the 5G network communication module of the drone terminal is used to connect Access to the 5G network, and use the 5G network to realize ultra-high-definition real-time video transmission to the drone; the ultrasonic ranging module is used to measure the distance from the beacon when the drone lands.
[0080...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com