Cargo positioning method based on Fourier-Mellin transformation
A technology of Merlin transformation and positioning method, which is applied in the field of mobile robots, can solve the problems of low recognition rate, wrong picking, high cost, etc., and achieve the effect of improving matching accuracy and performance, improving accuracy, and reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] The present invention will be specifically introduced below in conjunction with the accompanying drawings and specific embodiments.
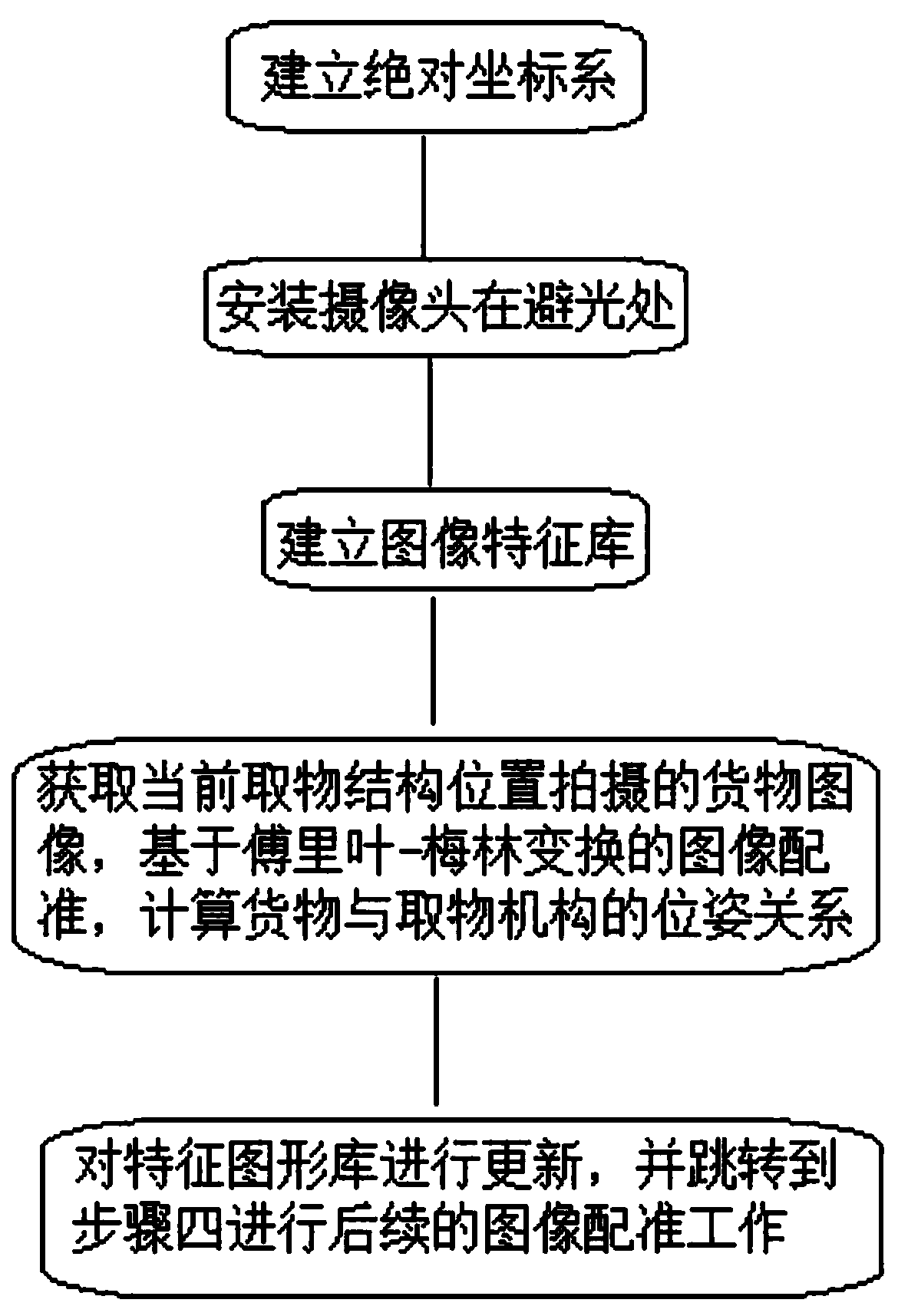
[0060] A cargo positioning method based on Fourier-Mellin transform, comprising the following steps:
[0061] Step 1, establish an absolute coordinate system,
[0062] Before the mobile robot moves,
[0063] Artificially set multiple calibration points in the coordinate system. The calibration points are set on the moving path to mark the position of the shelf. The absolute coordinates of each calibration point are known, and the positional relationship between the marking point and the shelf is also known;
[0064] Identify the calibration point and locate the position information of the shelf;
[0065] The specific method of identifying the calibration point and locating the location information of the shelf includes: the calibration point is fixed on the ground or on the shelf, the relative position of the calibration point and the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com