An unmanned aerial vehicle relay control system based on an efficient low-complexity LDPC code
An LDPC code, low-complexity technology, applied in the field of UAV relay command and control system, can solve the problems that hinder the large-scale use of UAVs, large transmission loss, channel congestion, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
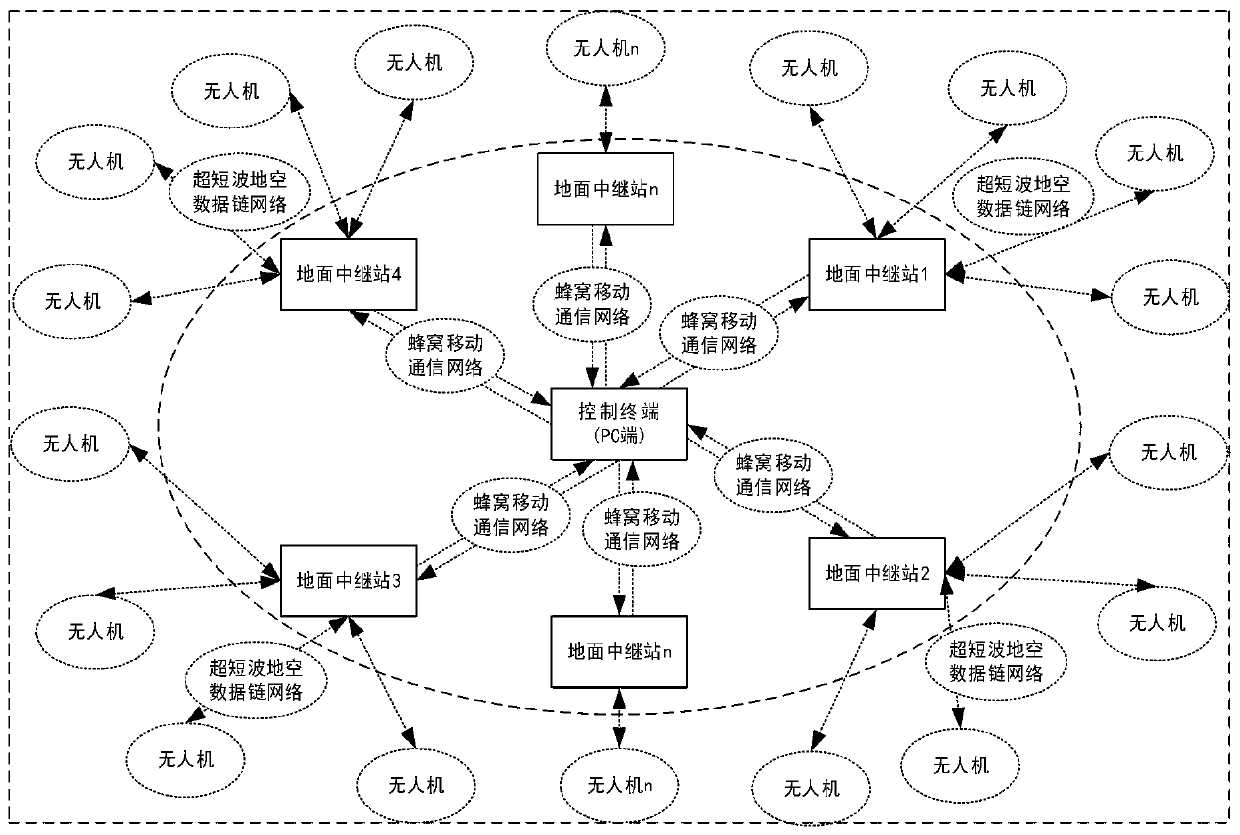
[0073] This embodiment provides an unmanned aerial vehicle relay command and control system based on high-efficiency and low-complexity LDPC codes. Temporary communication support and some areas of military activities can solve the previous limitation that UAVs and controllers must be in the same area, and can also improve the high-speed, accurate and reliable transmission of control information. UAV controllers can also use cellular mobile networks in different places. Transmission control to achieve real-time monitoring, directing the flight of UAVs, and obtaining various information captured by UAVs, and solving the problem of controlling UAVs in different places.
[0074] Specifically, such as figure 1 As shown, the UAV relay command system based on high-efficiency and low-complexity LDPC codes includes:
[0075] The control terminal is used to send control instructions to the UAV through the repeater, and receive the situation information of the UAV decoded and demodulat...
Embodiment 2
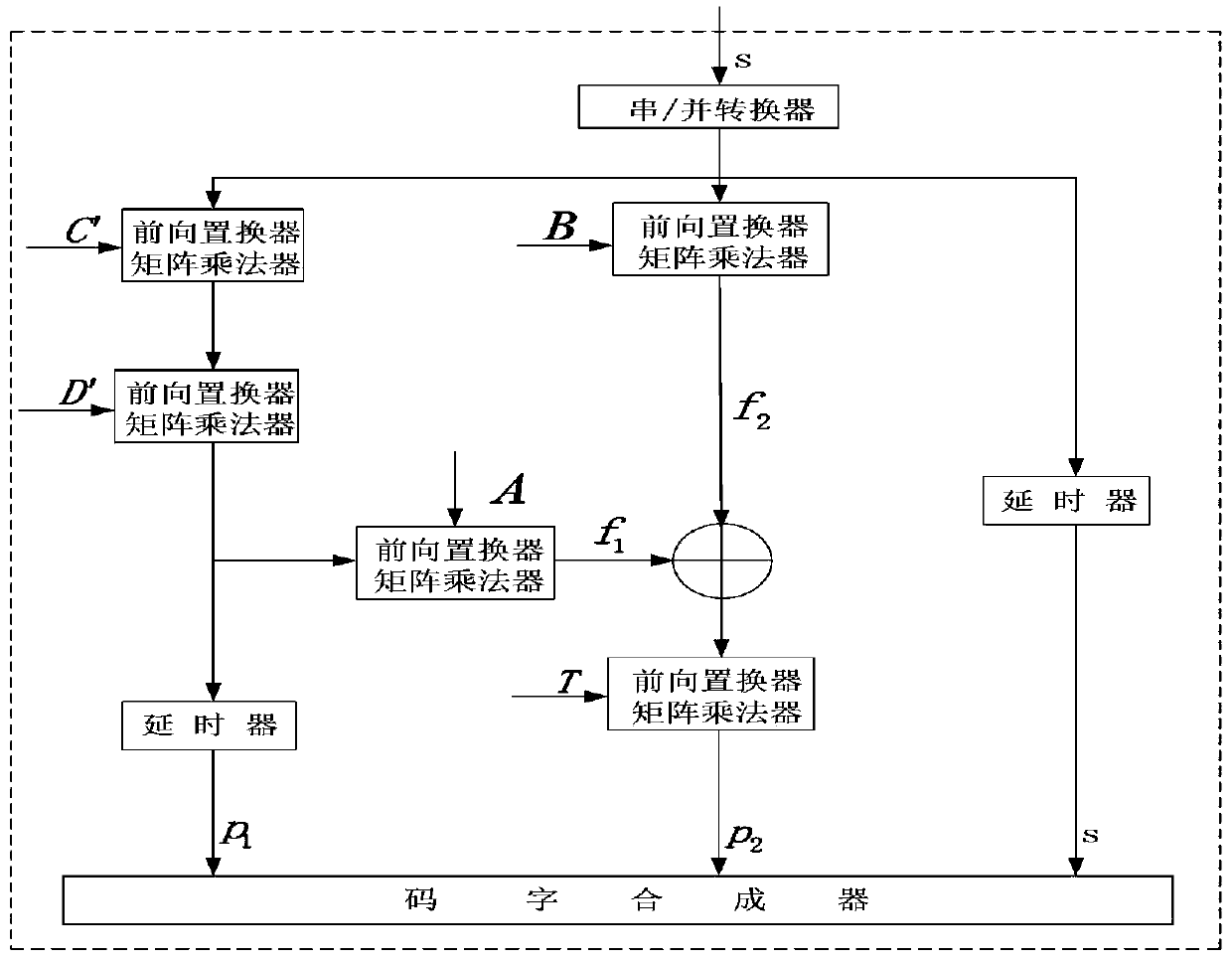
[0082] Based on the realization of Embodiment 1, this embodiment provides an unmanned aerial vehicle relay control system based on high-efficiency and low-complexity LDPC codes, and further discloses specific implementations of the codes.
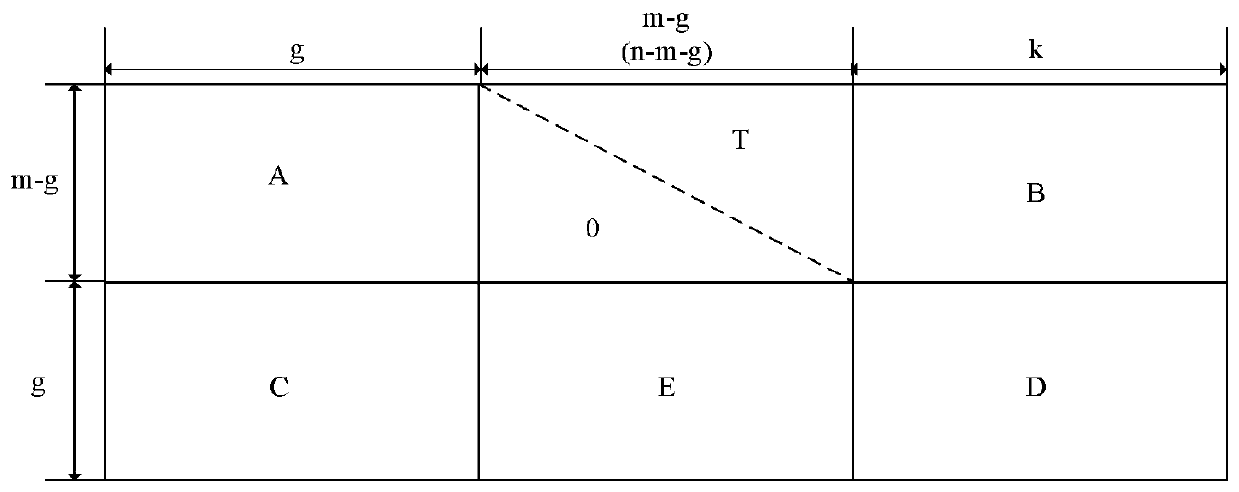
[0083] Firstly, the standard LDPC coding in the prior art is described, assuming that the code length of the LDPC code is n, the coding code word is c, the information code length is k, the information code word is u, and the check code length is m=n-k. Check matrix H can be reduced to:
[0084] H=[P m×k I m×m ]
[0085] In the formula: P m×k is a binary matrix of m×k, I m×m is an m×m identity matrix. By the calibration equation G·H T = 0 to get the generating matrix:
[0086] G = [I k×k P T k×m ]
[0087] The encoded codeword c can be obtained by c=u·G. If the coding rate R=k / n, then it can be known that the number of multiplications for coding a frame is k·n=R·n 2 , the number of additions is (k-1)·n=R·(n-1 / (2R)) 2 -1 / (4R). ...
Embodiment 3
[0111] Based on the realization of Embodiment 1, this embodiment provides an unmanned aerial vehicle relay control system based on high-efficiency and low-complexity LDPC codes, and further discloses the specific implementation of decoding.
[0112] Specifically, in the prior art, the decoding algorithms of LDPC codes are divided into hard-decision decoding algorithms and soft-decision decoding algorithms, and the basis of the soft-decision decoding algorithms is the Belief Propagation Algorithm (BP). Each iteration of the BP algorithm includes two steps: the processing of the check node and the processing of the variable node. The message of the BP algorithm is usually expressed in the form of probability, and it can also be expressed in the form of logarithmic likelihood ratio. The logarithmic likelihood ratio of BP algorithm Compared with the probability domain BP algorithm, the biggest advantage is that it converts a large number of multiplication operations into addition o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com