


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
A vehicle control method, model training method and device
A vehicle and model fitting technology, applied in neural learning methods, biological neural network models, etc., can solve a large number of parameter adjustment processes, difficult to obtain vehicle power configuration parameters, difficult vehicle speed conditions, etc., to achieve strong robustness, Avoid manual calibration, strong adaptability effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
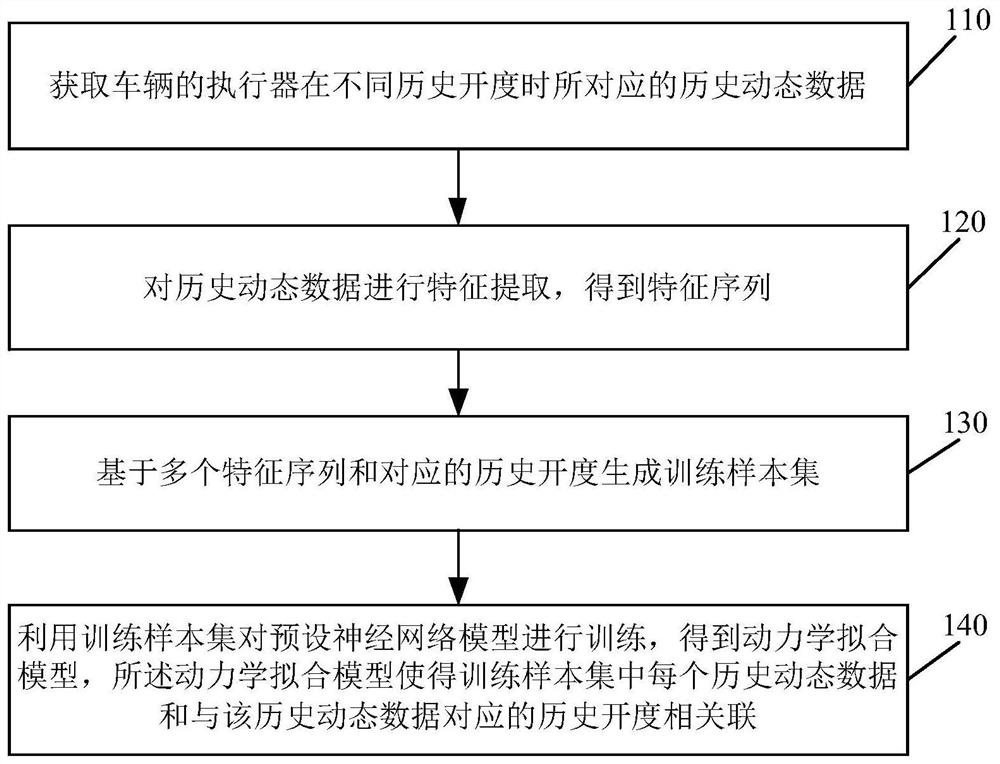
[0085] see figure 1 , figure 1 It is a schematic flowchart of a training method for a dynamic fitting model provided by an embodiment of the present invention. This method is applied in automatic driving and can be executed by a training device for dynamic fitting model, which can be realized by software and / or hardware, and can generally be integrated in a vehicle-mounted computer or a vehicle-mounted industrial personal computer (IPC). and other vehicle-mounted terminals, the embodiments of the present invention are not limited. Such as figure 1 As shown, the training method of the dynamic fitting model provided in this embodiment specifically includes:
[0086] 110. Obtain historical dynamic data corresponding to different historical opening degrees of the actuator of the vehicle.
[0087] Wherein, the actuator of the vehicle includes the accelerator pedal and the brake pedal of the vehicle, and the opening degree of the actuator represents the percentage of the depth o...
Embodiment 2
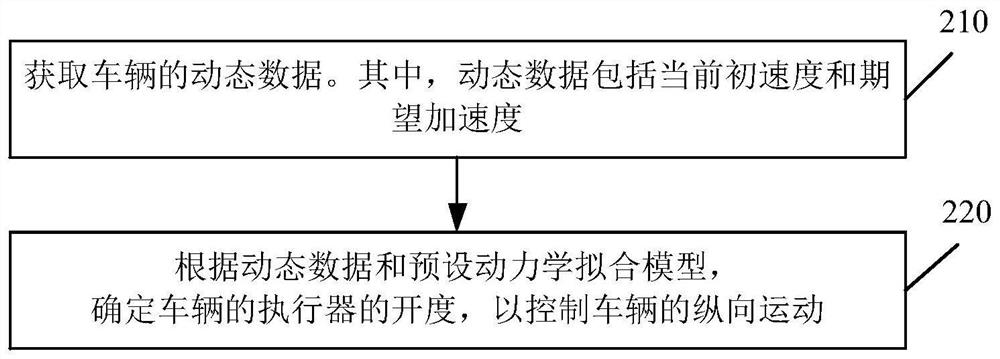
[0102] see figure 2 , figure 2 It is a schematic flowchart of a vehicle control method provided by an embodiment of the present invention. The method is applied in automatic driving and can be executed by the control device of the vehicle. The device can be realized by means of software and / or hardware, and generally can be integrated in a vehicle-mounted terminal such as a vehicle-mounted computer or a vehicle-mounted industrial control computer. Embodiments of the present invention do not Do limited. Such as figure 2 As shown, the vehicle control method provided in this embodiment specifically includes:
[0103] 210. Acquire dynamic data of the vehicle. Among them, the dynamic data includes the current initial velocity and the expected acceleration.
[0104] Wherein, the current initial velocity refers to the actual velocity of the vehicle at any moment, which can be used as the initial velocity of the vehicle at that moment. The expected acceleration is obtained ac...
Embodiment 3
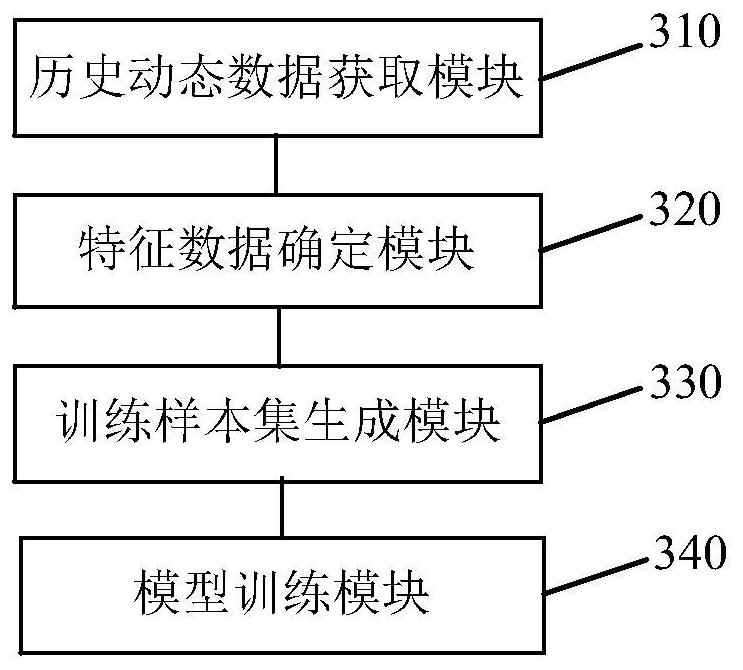
[0110] see image 3 , image 3 It is a structural schematic diagram of a training device for a dynamic fitting model provided by an embodiment of the present invention. Such as image 3 As shown, the device includes: a historical dynamic data acquisition module 310 , a characteristic data determination module 320 , a training sample set generation module 330 and a model training module 340 . in,
[0111] The historical dynamic data acquisition module 310 is configured to acquire the historical dynamic data corresponding to the actuators of the vehicle at different historical openings, wherein the historical dynamic data includes historical initial speed and corresponding historical expected acceleration;
[0112] The characteristic data determination module 320 is configured to perform feature extraction on the historical dynamic data to obtain a feature sequence;
[0113] The training sample set generating module 330 is configured to generate a training sample set based o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com