Target tracking method and device, and unmanned aerial vehicle
A target tracking and UAV technology, applied in the field of devices and UAVs, target tracking methods, can solve problems such as tracking failure, easy to lose targets, and rare features of targets
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
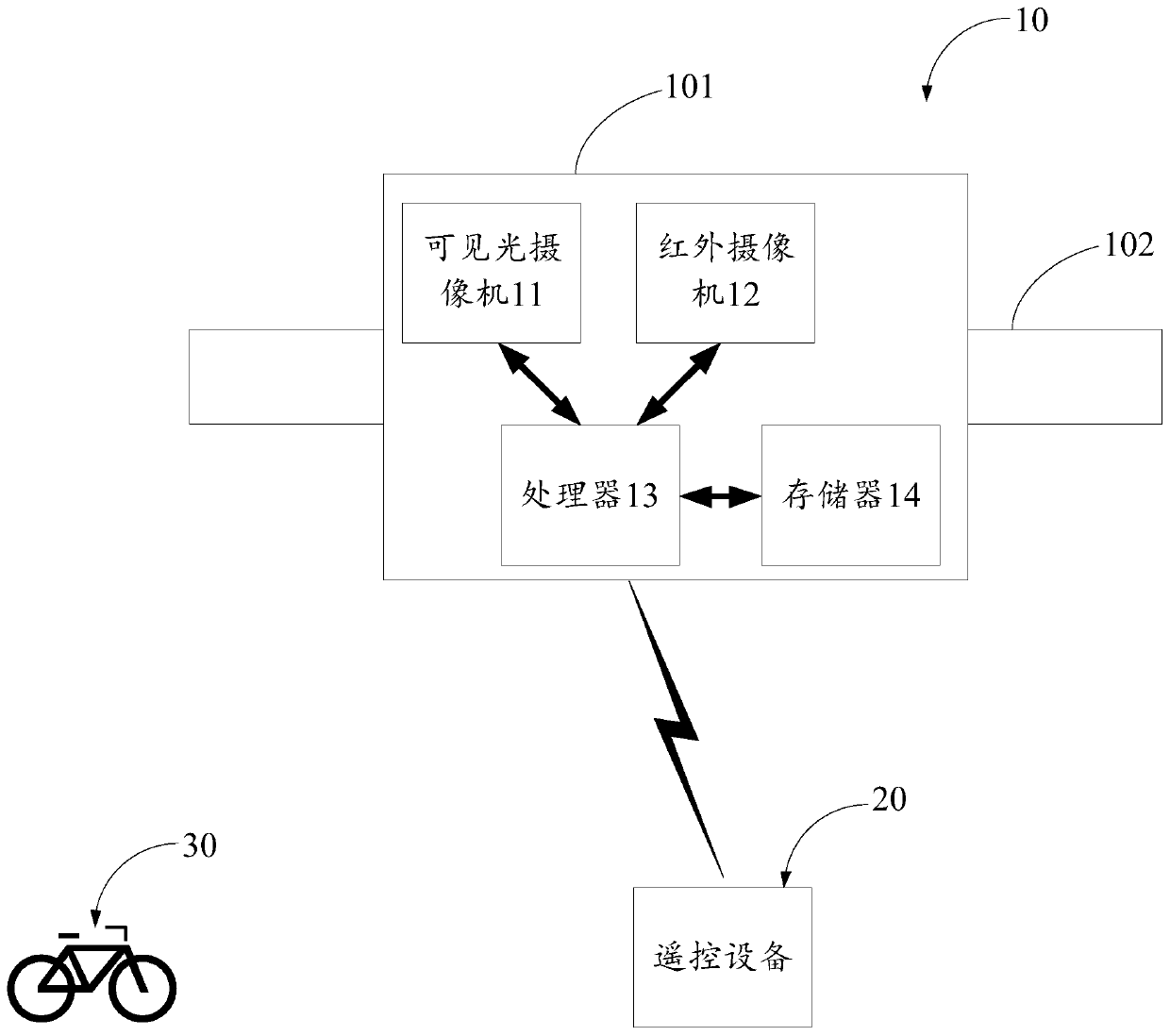
[0083] figure 1 is a schematic diagram of one application environment of the target tracking method provided by the embodiment of the present invention, please refer to figure 1 , the application environment includes: a drone 10 , a remote control device 20 and a target 30 . Wireless communication connection can be carried out by any means between the drone 10 and the remote control device 20, for example: wireless fidelity technology (Wireless Fidelity, Wi-Fi), bluetooth (Bluetooth) technology or such as the third generation ( 3rd Generation, 3G), fourth generation (4th Generation, 4G), or fifth generation (5th Generation, 5G) and other mobile communication technologies to implement wireless connection, which is not limited herein.
[0084] Wherein, the UAV 10 may be any type of unmanned aerial vehicle, which may include but not limited to: single-rotor UAV, quad-rotor UAV, six-rotor UAV, tilt-rotor UAV, etc. Wait.
Embodiment 2
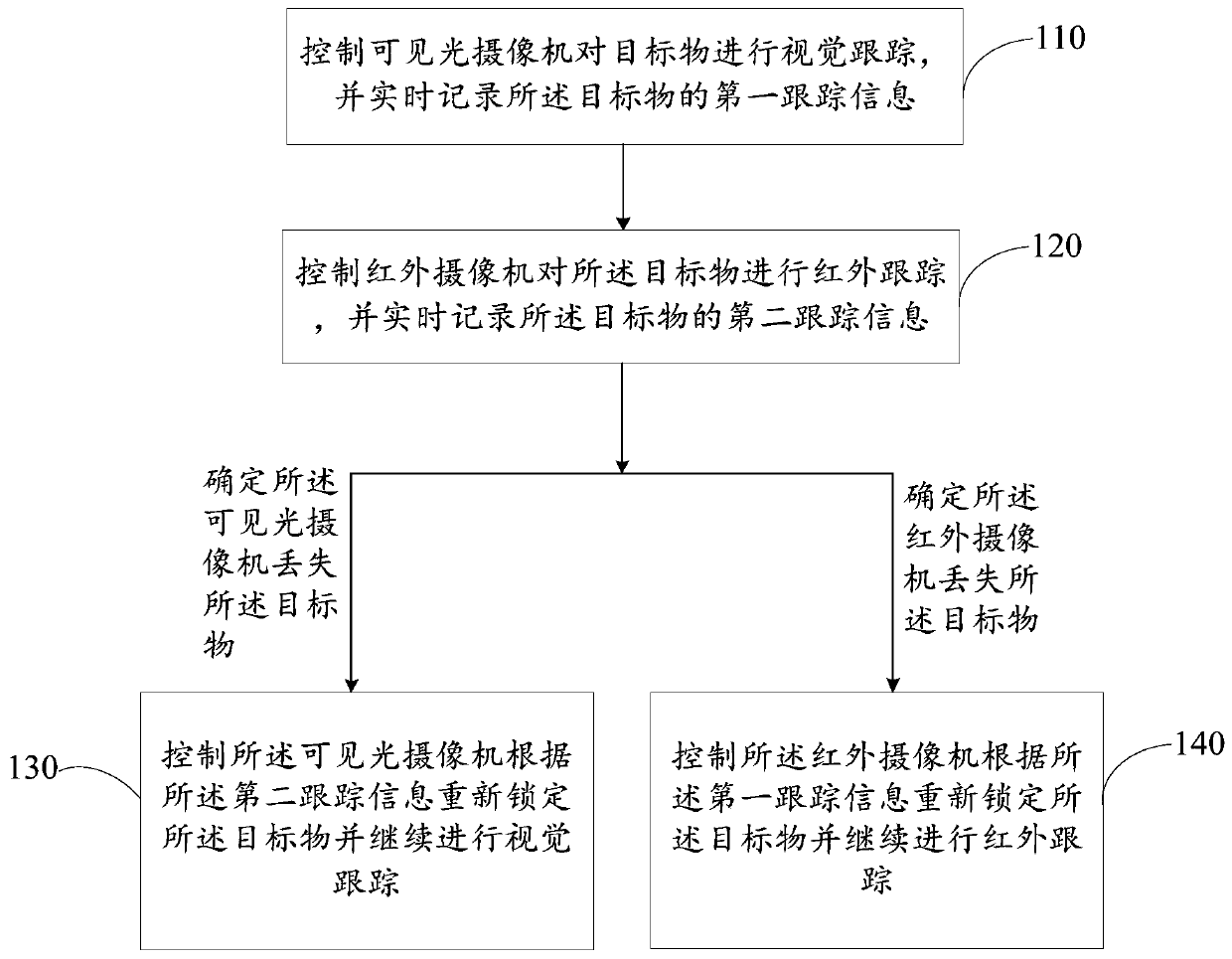
[0094] figure 2 is a schematic flowchart of a target tracking method provided by an embodiment of the present invention. This method can be executed by the UAV 10 mentioned above.
[0095] Specifically, see figure 2, the method may include but not limited to the following steps:
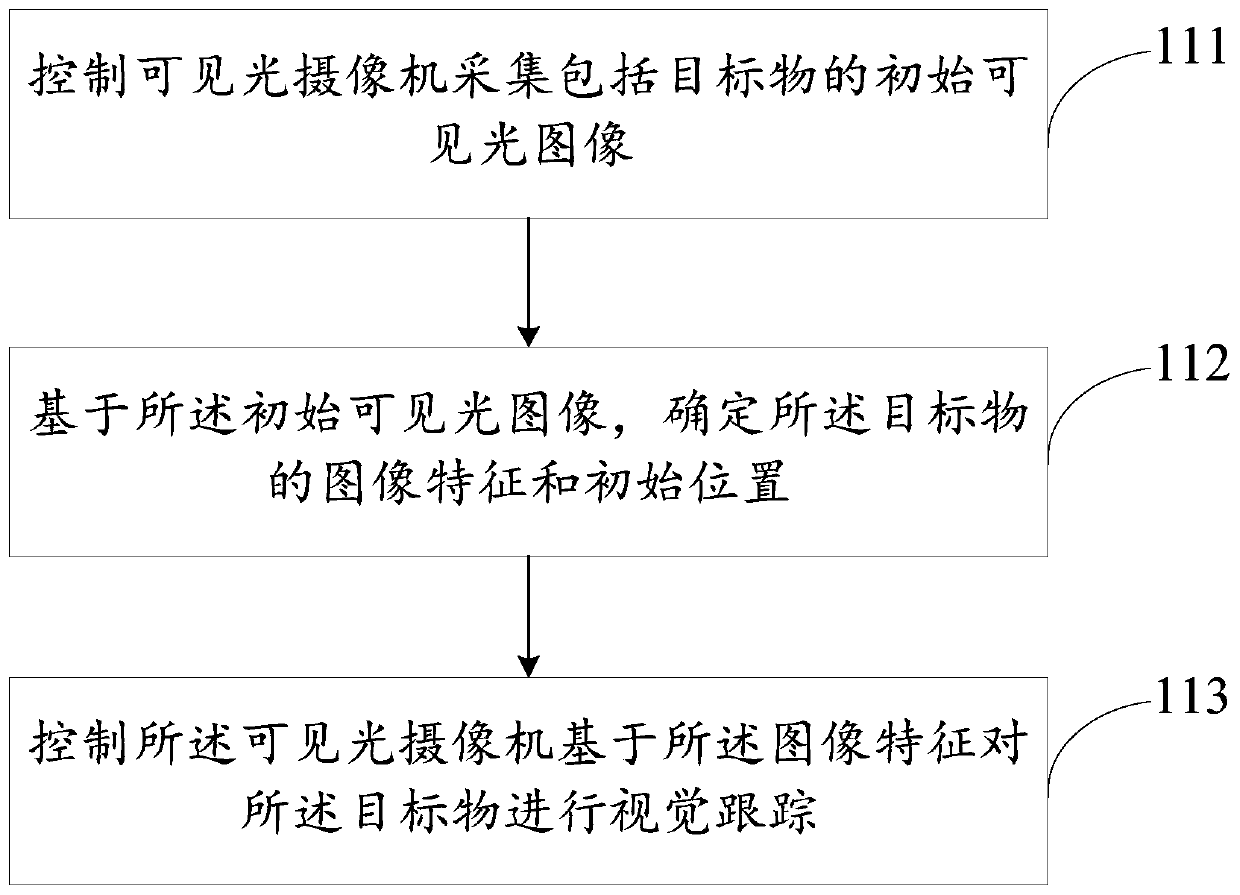
[0096] Step 110: Control the visible light camera to visually track the target, and record the first tracking information of the target in real time.
[0097] In this embodiment, the "target" is the target to be tracked, which can be automatically identified by the drone based on some given features (such as dynamic features, shape features, etc.), or can be obtained by the user through a remote control device. Feedback to the drone after selection. The "visual tracking" refers to tracking the target based on the sequence of visible light images. The "first tracking information" refers to the information obtained and recorded by the visible light camera when visually tracking the target, which...
Embodiment 3
[0134] Further, considering that the visible light camera and the infrared camera may not be able to correctly lock the target due to interference from environmental factors during the target tracking process, the embodiment of the present invention provides another target tracking method.
[0135] The difference between this method and the target tracking method provided in the second embodiment above is that the method further includes: when the first position information and the second position information are inconsistent, judging whether the visible light camera and the infrared Whether the camera is being interfered with. If the visible light camera is not disturbed, then control the infrared camera to re-lock the target according to the first position information and continue infrared tracking; if the visible light camera is disturbed, but the infrared camera is not disturbed , then control the visible light camera to re-lock the target according to the second position ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com