A Nulling Algorithm for Pointer Meter
A pointer and instrument technology, applied in the field of automotive pointer instruments, can solve the problems of zero reset and stop zero return command amplification, instrument pointer deviation from the zero position of the scale, affecting the use of pointer instruments, etc., to reduce zero error and zero return speed Fast, effect of increasing the range of rotation available
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with accompanying drawing and embodiment:
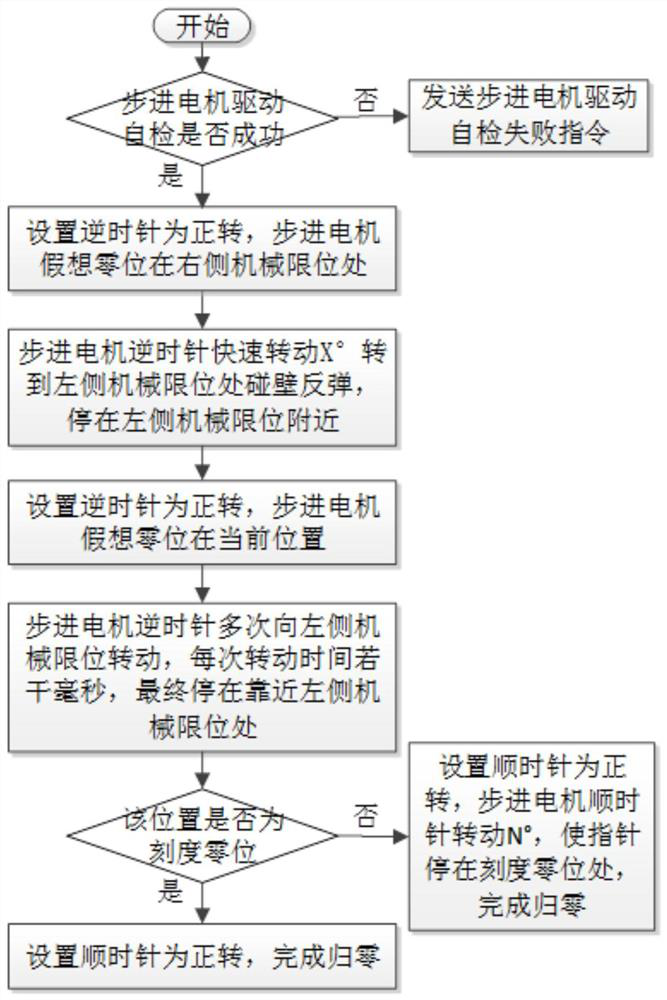
[0025] The zero return and stop zero return instructions will greatly amplify the error caused by the different initial positions, so the present invention no longer uses these two instructions, and uses a new zero return algorithm to complete the zero return. The zeroing algorithm is solidified in the DSP chip, and its main task is to make the pointer be at the same position as close to the mechanical limit of a certain stepping motor as possible before each work, and set this position or the position N° away from this position as the instrument The zero position of the scale, the zero position of the scale here can be 0 on the scale, or other scale numbers as required. like figure 1 As shown, the pointer is close to the mechanical limit on the left side of the stepper motor when the pointer is at the zero position of the scale as an example. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com