Pure electric vehicle driving strategy control method based on fuzzy control and dynamic programming
A pure electric vehicle, fuzzy control technology, applied in the direction of data processing management, road transportation emission reduction, etc., can solve the problems of insufficient consideration of the vehicle's driving economy, and achieve the effect of ensuring power, economy, and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
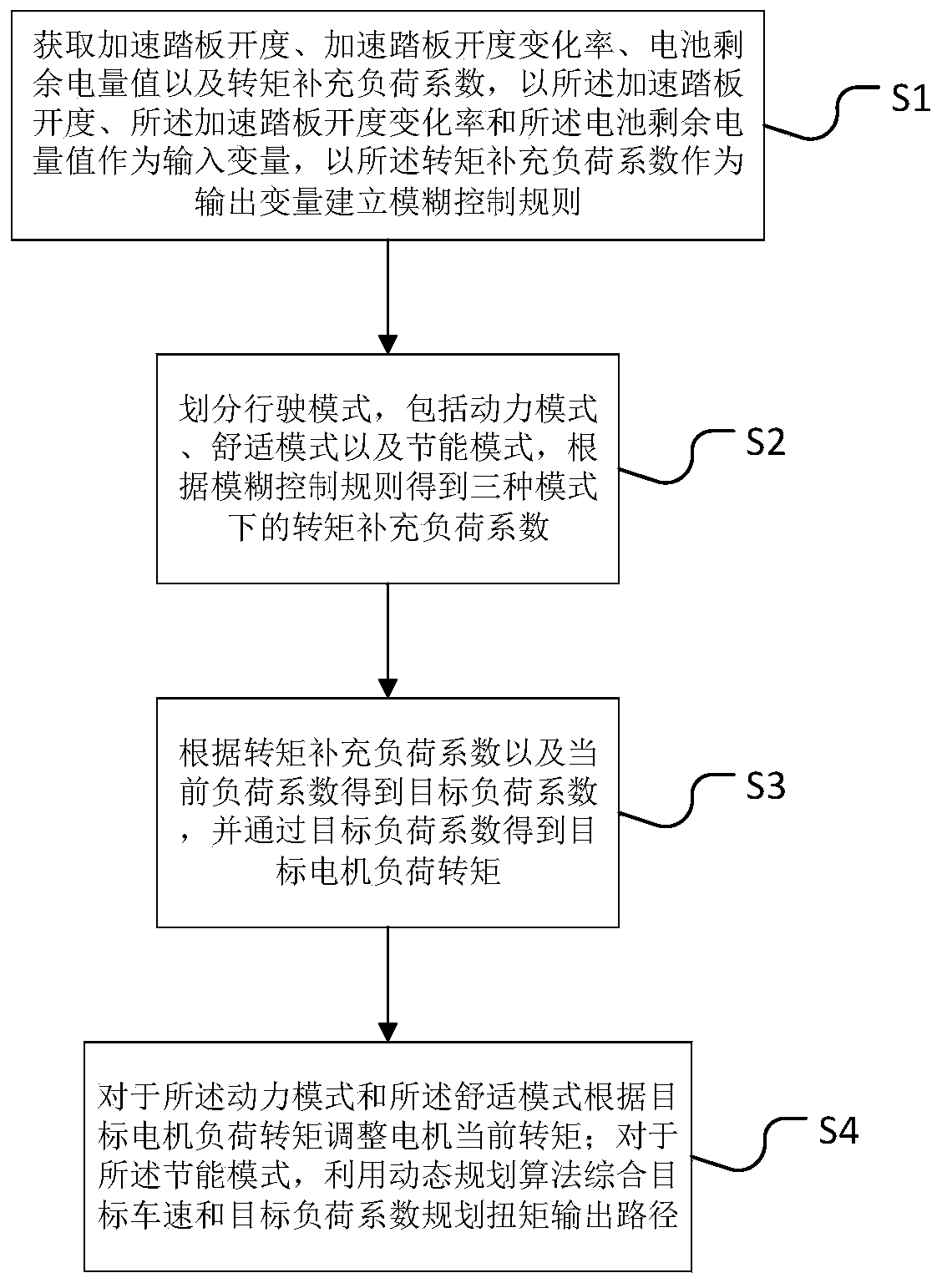
[0046] Embodiment 1: The present invention provides a pure electric vehicle driving strategy control method based on fuzzy control and dynamic programming, see figure 1 , including the following steps:
[0047] S1: Obtain the accelerator pedal opening, the rate of change of the accelerator pedal opening, the value of the remaining battery power, and the torque supplementary load factor, with the accelerator pedal opening, the rate of change of the accelerator pedal opening, and the value of the remaining battery power as input variables, and the torque The supplementary load factor is used as the output variable to establish fuzzy control rules;
[0048] S2: Divide the driving mode, including power mode, comfort mode and energy-saving mode, and obtain the torque supplementary load coefficients in the three modes according to the fuzzy control rules;
[0049] S3: Obtain the target load factor according to the torque supplementary load factor and the current load factor, and ob...
Embodiment 2
[0052] Embodiment 2: The principle of normal driving of a pure electric vehicle is that the motor system outputs the actual torque after receiving the torque command from the vehicle controller, and drives the wheels through the transmission device. Therefore, determining the required torque characteristics of the drive motor is the key to study the drive control strategy. The opening of the accelerator pedal can reflect the driver's demand for the torque of the drive motor, and the motor speed can represent the output capability of the motor's maximum torque at the current speed. In order to more clearly determine the relationship between the accelerator pedal opening and the driver's demand torque, the relationship between the motor torque load factor L and the accelerator pedal opening P_acc is defined as:
[0053] L=f(P_acc)
[0054] see figure 2 , according to the division of vehicle working modes, three relationship curves of motor torque load factor L and accelerator p...
specific Embodiment approach
[0102] In the first step, according to the driving requirements of power mode, comfort mode and energy-saving mode, the relationship curves of three kinds of motor torque load coefficients and accelerator pedal openings are formulated respectively;
[0103] In the second step, in order to make the motor power output corresponding to different accelerator pedal openings more uniform and smooth, the mathematical expression of the motor demand torque determined according to the motor torque load factor and the motor speed;
[0104] The third step is to design a fuzzy controller with the accelerator pedal opening, the rate of change of the accelerator pedal opening and the remaining battery power as the input variables, and the compensation load coefficient after driving intention recognition as the output variable to establish a fuzzy controller, and select the triangular function as the input and output variables The membership function of ;
[0105] The fourth step is to establis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com