Point cloud registration method based on geometric surface description of feature points
A geometric surface, point cloud registration technology, applied in the field of 3D reconstruction, can solve the problems of high computational complexity, weak anti-noise ability, poor robustness, etc., to achieve good robustness, speed up calculation, and improve registration efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
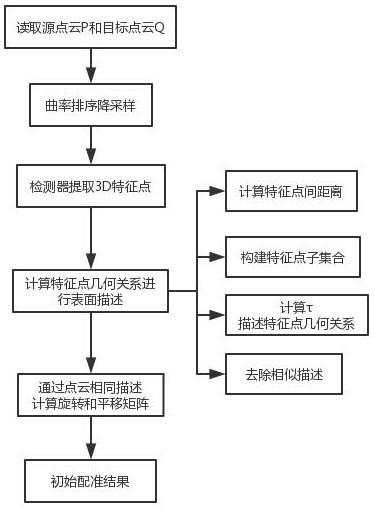
[0050] This embodiment is a point cloud registration method based on feature point geometric surface description, such as figure 1 As shown, the details are as follows:
[0051] Step 1: Collect two sets of data, the source point cloud P and the target point cloud Q, and the point cloud data is required to be obtained from different perspectives with a certain degree of overlap.
[0052]Step 2: Data downsampling based on point cloud curvature. The moving least square method surface fitting calculates the curvature of the point cloud. In order to ensure the running speed, the calculation simultaneously inserts and sorts the curvature values from large to small. According to actual needs, the large curvature points are reserved by percentage, simplifying the data and speeding up the registration speed. The Gaussian curvature k is calculated by the following formula:
[0053]
[0054] Where g(x) is the minimum value of the partial derivative of the energy function e(y, a), ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com