Fruit picking robot
A technology for picking robots and fruits, which is applied in the direction of picking machines, manipulators, harvesters, etc. It can solve the problems of picking target positioning, fruit mechanical damage, etc., and achieve the effect of reducing mechanical damage, avoiding fruit damage, and facilitating preservation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
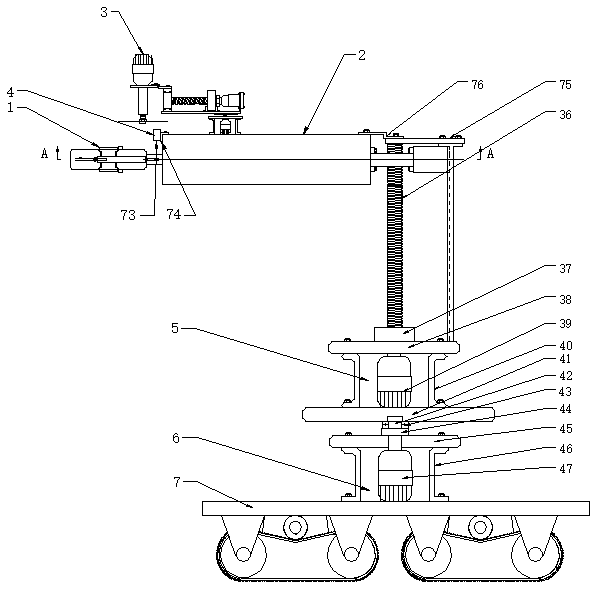
[0029] refer to figure 1 , the object of the present invention is to propose a fruit picking robot, comprising: a grasping part 1, an arm part 2, a stem cutting part 3, a vision system 4, a lifting part 5, a rotating part 6 and a mobile base 7; The grip part 1 is fixed on the front end of the arm part 2; the other end of the arm part 2 is connected with the lift part 5; according to figure 1 , the vision system 4 is located above the grasping part 1 and fixed on the front end of the arm part 2; the stem cutting part 3 is fixed above the arm part 2; the lower end of the lifting part 5 is connected to the rotating Part 6 is connected; said rotating part 6 is connected with a mobile base 7 .
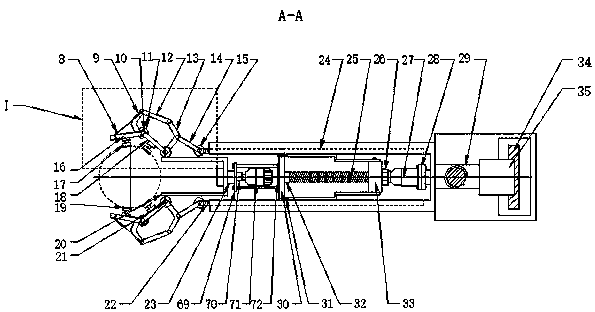
[0030] according to figure 1 , the grasping part 1 includes: a finger link mechanism I, a support plate 20, a telescopic motor 71 and a carriage 30; the finger link mechanism I is fixed on one end of the support plate 20, and the telescopic motor 71 is The fixed plate 72 is fixed to the ...
Embodiment 2
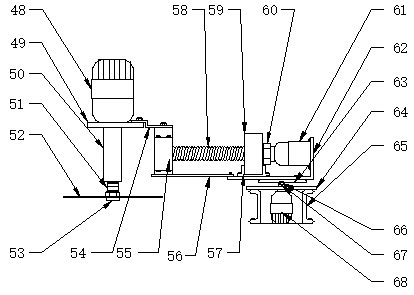
[0040] The working mode that the present invention can realize is to collect the ripeness degree, the position size, the position and the fruit stem position information of the fruit to be picked by the industrial camera 73 in the visual system 4, and then the collected information is fed back to the controller, and the collected information is fed back by the controller. To process and analyze the mature fruit and its fruit stem, the controller drives each motor to work independently through the motor driver: through the telescopic motor 71 to control the finger linkage mechanism I of the grasping part to realize the clamping of the fruit; through the telescopic arm screw Driven by motor 27, lifting motor 39 and rotating motor 47, the positioning of the clamping position for fruit picking is realized; the rotation of the circular blade is controlled by the shearing motor 48 to realize the cutting of the fruit stem; the shearing telescopic motor 61 and the shearing rotary motor ...
Embodiment 3
[0042]The finger link mechanism adopted by the grasping part of the present invention uses extension spring 8 as a limiting mechanism to make it have a gripping function; the finger link mechanism I adopts a series link mechanism, and the extension spring 8 and the With the cooperation of the finger linkage mechanism I, the fruit is grasped, and the finger linkage mechanism I can adapt to the shapes of various fruits; and considering the fragility of fruit picking, the proximal fingers of the finger linkage mechanism I The middle position of joint 18 and far knuckle 16 is equipped with plate pressure sensor 17 respectively, is used for sensing the contact force of fruit, avoids the fruit damage that causes because of excessive contact force; The silica gel pad 19 not only increases the friction between the fruit and the finger surface, but also plays a certain buffering effect on the force applied to clamp the fruit, further reducing the mechanical damage of the force-type clam...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com