


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Main hand end operation mechanism of master-slave operation vascular interventional surgery robot
An operating mechanism and interventional surgery technology, which is applied in the direction of surgical manipulators, surgical robots, etc., can solve the problems that the operating method does not conform to the operating habits of manual interventional surgery, affects the position accuracy of the catheter/guide wire, and does not fully conform to the operating habits of doctors, etc., to achieve Effects of reducing catheter disturbance, alleviating catheter disturbance, and preventing vasospasm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
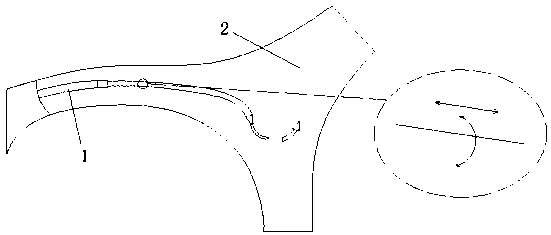
[0032] Embodiment 1: as Figure 1-5 As shown, the master hand operating mechanism of a master-slave operation robot for vascular interventional surgery provided in this embodiment includes the master hand, and the master hand operating mechanism also includes: an axial propulsion movement and feedback force realization mechanism (3) and rotary motion realization mechanism (4), the axial propulsion movement and feedback force realization mechanism (3) includes a magnetic powder brake device that transmits a certain torque, and the one-time effective stroke of the axial propulsion movement and feedback force realization mechanism (3) is greater than Equal to 150mm, the rotation stroke of the rotary motion realization mechanism (4) is greater than or equal to ±1080°, the degree of freedom of the main hand operation mechanism is two degrees of freedom, and the operation of the main hand operation mechanism has a certain force to prevent the guide wire (1) The guide wire (1) slips ...
Embodiment 2
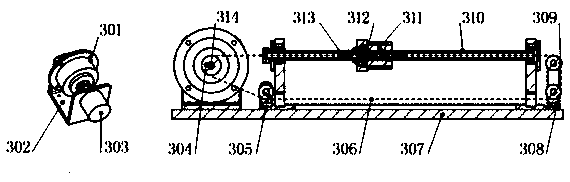
[0038] Embodiment 2: reference Figure 1-5 As shown, the principle is the same as in Embodiment 1, the difference is that in this embodiment, the total weight of the master hand operating mechanism of the master-slave operation vascular interventional surgery robot is about 1.5kg, and the effective stroke is 200mm; the master hand operating mechanism rotates The moving synchronous pulley A (402) and the synchronous pulley B (407) have the same diameter, and the transmission ratio of the rotational motion transmitted from the operating sleeve (506) to the encoder (303, 405) is 1:1.
[0039] In this example, if Figure 1-5 As shown, the operating mechanism of the main hand terminal is wearable, with a volume of 50*100*90mm and a weight of no more than 2kg.
Embodiment 3
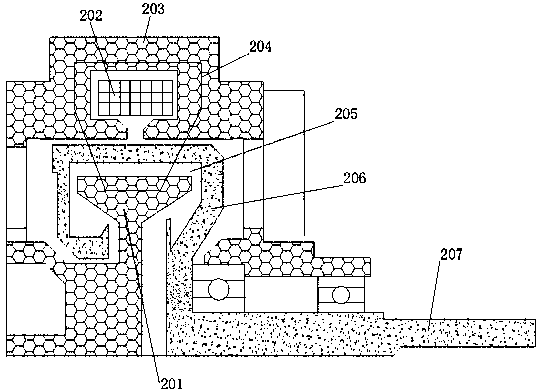
[0040] Embodiment 3: reference Figure 1-5 As shown, the principle is the same as in Embodiments 1 and 2, the difference is that in this embodiment, the diameter of the operating sleeve (506) is 15mm, which is convenient for the doctor to use the thumb and middle finger to hold the operating sleeve (506) to complete the operation .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com