
Patsnap Eureka
For R&D, Patsnap Eureka makes reading and utilizing patents & technical documents easy.
Patsnap Eureka AIR
Designed for self-driven R&D workflows. Generate viable solutions, solve complex R&D challenges, empower your innovation with AI.

Patsnap Eureka Materials
Designed for material experts only. Revolutionize your material R&D, from search, analyze, to developing new materials.

TechResearch
Generate reliable direction feasibility study reports for your R&D in just a few steps.

TechSeek
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

TechMind
As an expert in R&D Theories, TechMind can generates customized viable solutions instantly.

TechRisk
Analyze your overall solution with one click, know your potential R&D risks in advance.

TechMonitor
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Size-adaptive article grabbing method and device adopting same
A self-adaptive, article technology, applied in the direction of conveyor objects, transportation and packaging, furnaces, etc., can solve the problems of dimensional errors, fragile, sensitive gripping force, etc., to reduce equipment costs, improve production efficiency, prevent articles pinched effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
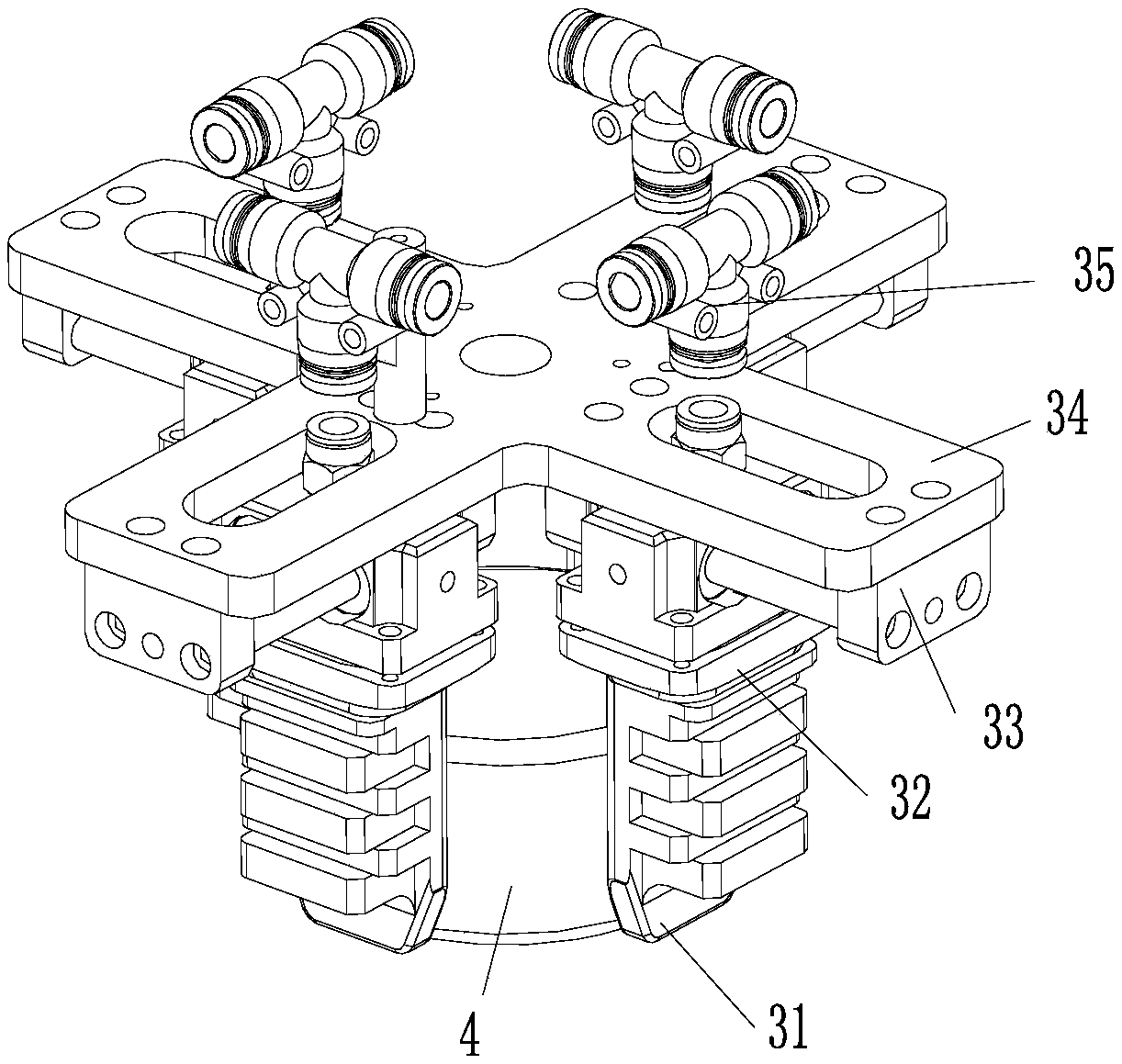
[0044] In this embodiment, the size-adaptive item grabbing method uses at least two soft fingers 31 to grab the item; before the soft fingers 31 grab the item, first obtain the size of the item, and set the driving air pressure value according to the size of the item; During the process of the finger 31 grasping the object, the air pressure system inflates the interior of the soft finger 31 according to the driving air pressure value to drive the soft finger 31 to bend and grab the object, so that the gripping force provided by the soft finger 31 adapts to the size of the object.
[0045] In the method of the present invention, the air pressure system inflates the inside of the soft finger 31 to drive the soft finger 31 to bend and deform to provide a gripping force on the object, and the internal air pressure of the soft finger 31 is adjusted according to the size of the object to adapt the gripping force provided by the soft finger 31 The size of the item can not only firmly ...
Embodiment 2
[0062] The difference between the size-adaptive object grabbing method of this embodiment and the first embodiment is that in this embodiment, the position of the soft finger is not adjusted according to the size of the object; after the size of the object is obtained, the driving air pressure value is set according to the size of the object ; The air pressure system inflates the interior of the soft finger according to the driving air pressure value to drive the soft finger to bend and grab the object, so that the gripping force provided by the soft finger is adapted to the size of the object.
[0063] Correspondingly, in the device of this embodiment, each finger mounting head is slidably disposed on the finger mounting frame, and a fastening structure is provided between the finger mounting head and the finger mounting frame. The rest of the structure of this embodiment is the same as that of Embodiment 1.
Embodiment 3
[0065] The difference between the size-adaptive object grabbing method of this embodiment and the second embodiment is that in this embodiment, before the software finger grabs the item, first obtain the item size and identify the item type, and set it according to the item size and item type Driving air pressure value. Different types of objects have different hardness and fragility, especially the surface of the object has different hardness and fragility, and the requirements for gripping force will be different. Therefore, the method of the present invention considers the size of the item and the type of the item to set the driving air pressure value, which can provide suitable gripping force for different types of items of different sizes to firmly grasp the item, and can further avoid pinching the entire item or the surface of the item. ; It can be used to grab only a single type of item in a batch, and workers do not need to debug when the next batch starts to grab, fur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com