Data-driving-based AUV (Autonomous Underwater Vehicle) undersea target search navigation system and method
A data-driven, target-seeking technology, applied in the direction of finding the target control, etc., can solve the problems of long search time and low search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
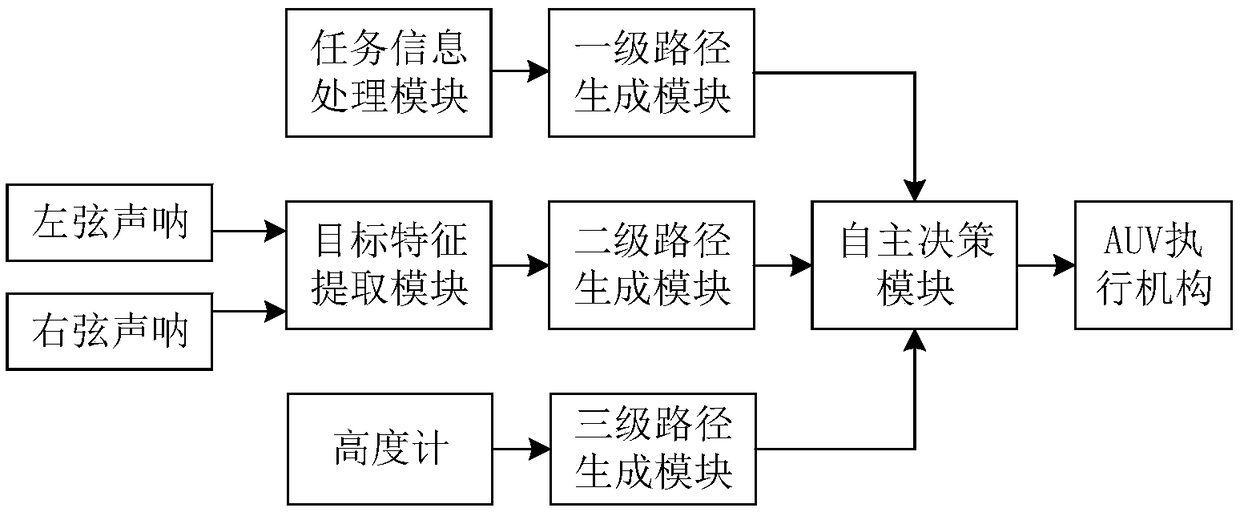
[0064] Embodiment 1, a kind of data-driven AUV seabed target search and navigation system, such as figure 2 As shown, it includes mission information processing module, side scan sonar, target feature extraction module, altimeter, first-level path generation module, second-level path generation module, third-level path generation module, autonomous decision-making module and AUV executive mechanism; the mission information The processing module is used to receive the task parameters of the target to be searched, and the task information processing module processes the received task parameters in combination with the AUV's own position state to obtain the dynamic grid chart coordinates, and transmits it to the first-level path generation module to obtain a level path point set P I ; The side-scan sonar includes a left-string sonar and a right-string sonar for detecting target sonar images, and the target feature extraction module extracts the target area coordinates of the tar...
Embodiment 2
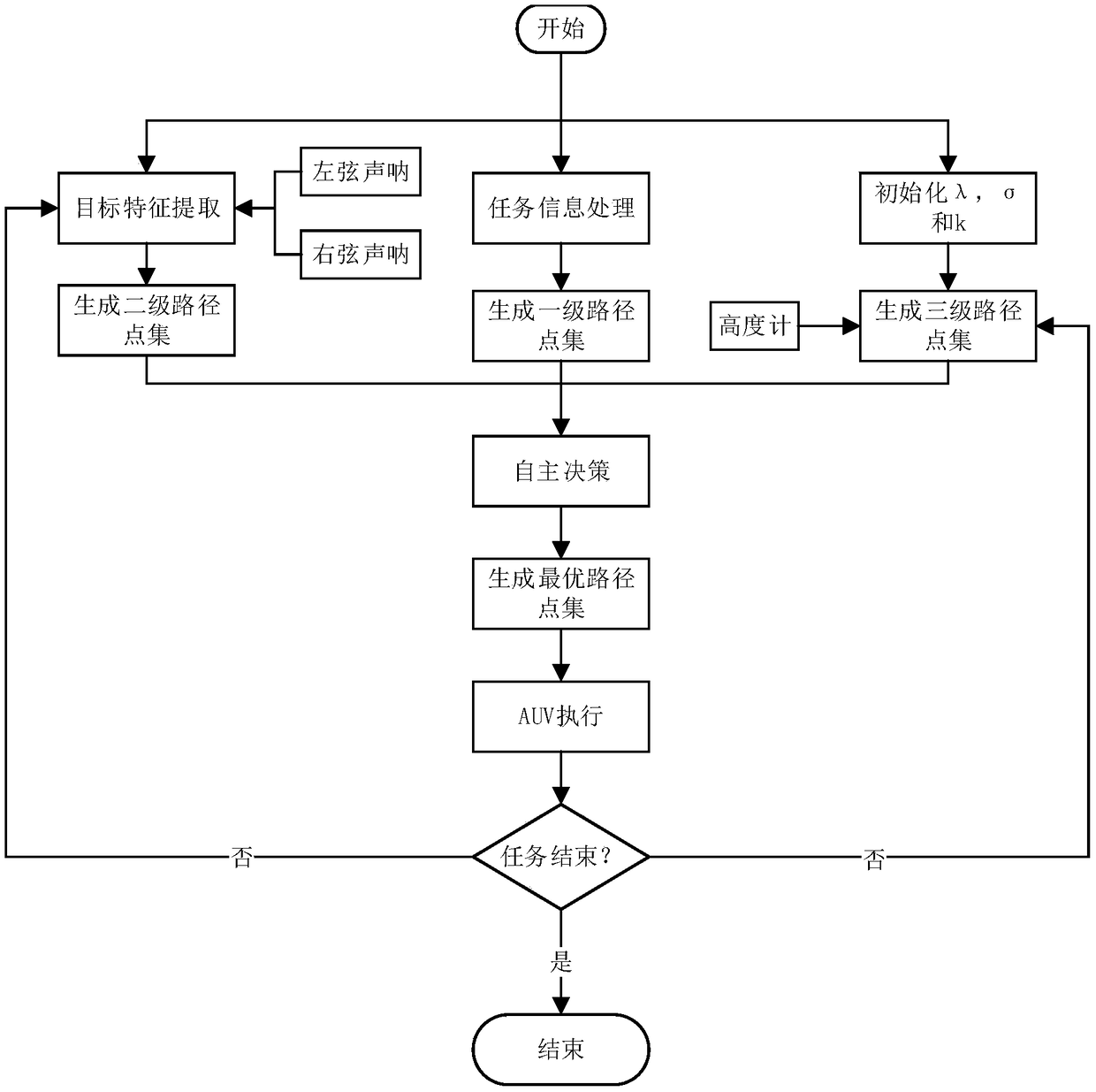
[0085] Embodiment 2, based on the search and navigation system proposed in Embodiment 1, this embodiment discloses a data-driven AUV seabed target search and navigation method, combining image 3 shown, including the following steps:
[0086] Step S1, the task information processing module receives the task parameter information of the target to be searched, and according to the coordinate set P of the searched area in , grid size d in , according to the current position of the AUV, obtain the minimum circumscribed rasterized area coordinate set P mission and mission area parameter set MissionMap:
[0087]
[0088] θ 0 =arccos(min(A·(max(P in )-min(P in )) 2 ));
[0089] Among them, A is the coordinate transformation matrix, θ 0 is the optimal coordinate transformation angle; the mission area parameter set MissionMap includes the length of the mission area Length, width Width and the number of grids N grid ;
[0090] Step S2, the task information processing modu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com