In-loop rapid simulation test system and method of unmanned vehicle
A simulation test, unmanned vehicle technology, applied in vehicle testing, electrical testing/monitoring, machine/structural component testing, etc., can solve the problems of inability to test the danger of unmanned vehicles, time-consuming and laborious, and inaccurate simulation results. , to achieve the effect of shortening test time, ensuring safety and reducing area
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
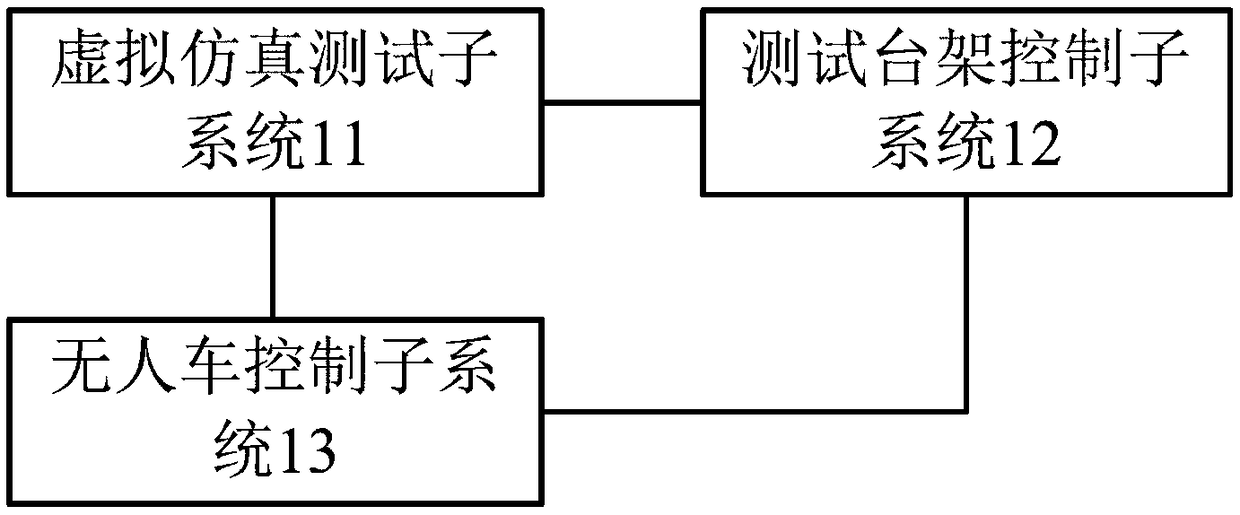
[0068] refer to figure 1 , shows a structural block diagram of an unmanned vehicle-in-the-loop rapid simulation test system of the present invention, as figure 1 As shown, the system includes: a virtual simulation test subsystem 11, a test bench control subsystem 12 and an unmanned vehicle control subsystem 13; wherein,
[0069] The virtual simulation test subsystem 11 is used to generate a virtual test scene, and sends a road state control instruction corresponding to the current virtual test scene to the test bench control subsystem 12;
[0070] The test bench control subsystem 12 is used to simulate the road surface state according to the road surface state control instruction sent by the virtual simulation test subsystem 11; it is also used to obtain the unmanned vehicle driving parameters of the unmanned vehicle, and according to the The driving parameters of the unmanned vehicle are used to evaluate the driving performance of the unmanned vehicle;
[0071] The unmanned...
Embodiment 2
[0135] refer to Figure 4 , shows a flow chart of the steps of an unmanned vehicle-in-the-loop rapid simulation test method of the present invention, the method is applied to a virtual simulation test subsystem, and may specifically include:
[0136] Step 401, generating a virtual test scene;
[0137] Step 402, sending a road surface state control instruction corresponding to the current virtual test scene to the test bench control subsystem.
[0138] In an optional embodiment of the present invention, the method also includes:
[0139] Generate a virtual unmanned vehicle, and control the virtual unmanned vehicle to drive in the virtual test scene according to the unmanned vehicle driving parameters sent by the test bench control subsystem, and obtain the scene in the virtual scene during driving information; among them,
[0140] The scene information includes but is not limited to one or more of the following information:
[0141] Weather information, road physical enviro...
Embodiment 3
[0147] refer to Figure 5 , shows a flow chart of the steps of an unmanned vehicle-in-the-loop rapid simulation test method of the present invention, the method is applied to the test bench control subsystem, and may specifically include:
[0148] Step 501: Simulate the road state according to the road state control command sent by the virtual simulation test subsystem, and the unmanned vehicle drives on the simulated road;
[0149] Specifically, the unmanned vehicle drives on the test bench of the test bench control subsystem, and the test bench control subsystem controls the test bench to simulate various road conditions, such as slope, roll angle, road slipperiness, driving resistance etc.
[0150] Step 502, obtaining the unmanned vehicle driving parameters of the unmanned vehicle;
[0151] Specifically, the sensors on the test bench obtain the driving parameters of the unmanned vehicle, which may include driving speed, acceleration, steering angle, and so on.
[0152] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com