Unmanned plane synergy message transmission method based on dynamic planning
A technology of message transmission and dynamic planning, applied in radio transmission systems, transmission systems, digital transmission systems, etc., can solve the problems of message transmission time delay, lack of consideration of UAV location information, and insufficient geographic routing, so as to reduce time delay. , the effect of reducing transmission delay time and reducing energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] The present invention is described in further detail now in conjunction with accompanying drawing.
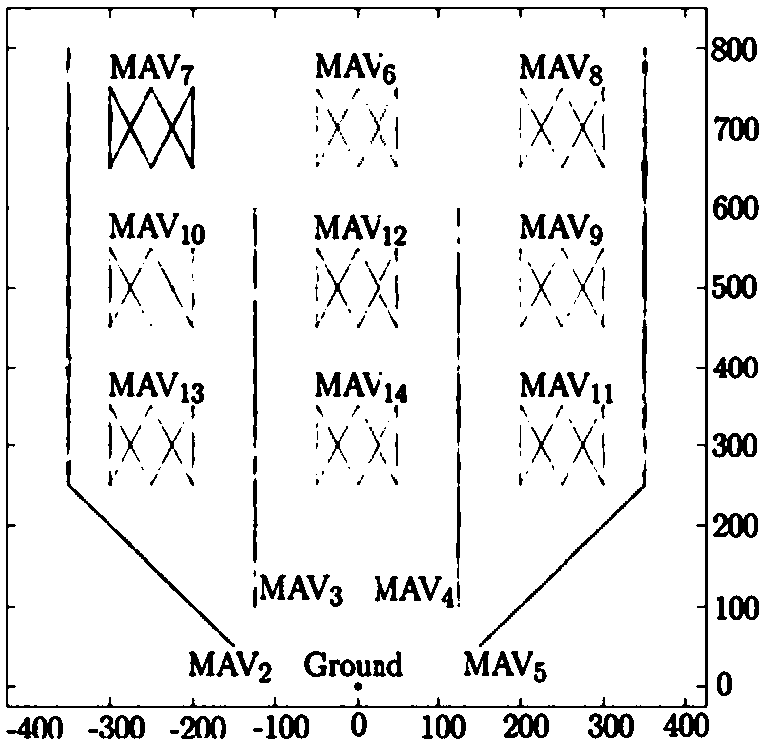
[0029] The invention proposes a dynamic programming-based UAV cooperative message transmission method, and the application field is message routing of UAV groups. Since the drone message transmission satisfies the following two characteristics: 1) No aftereffect: the message transmission at the current time t will only consider the position of the drone at a later time, and will not consider the position of the drone before the time t; 2) Optimal substructure: As long as the UAV transmits messages to ensure the fastest transmission of each hop, the total message transmission must be the fastest.
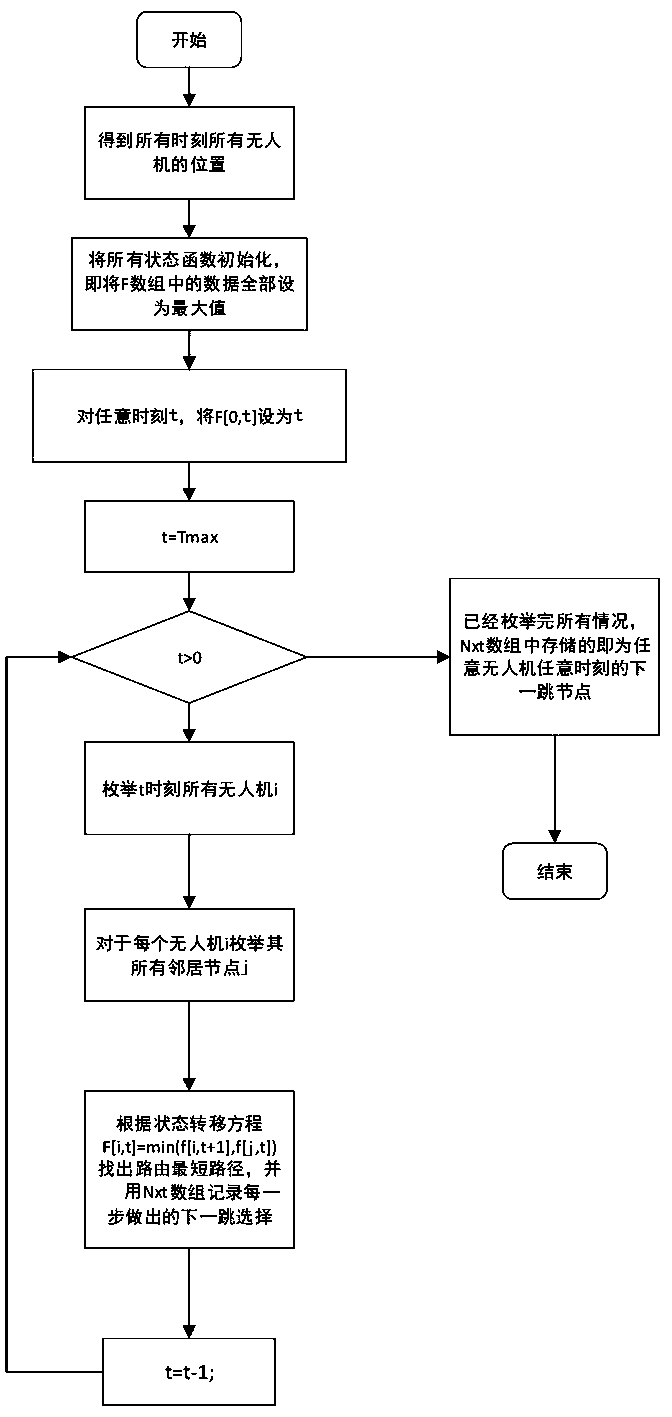
[0030] So consider using the idea of dynamic programming to solve the problem of UAV message transmission. The idea of dynamic programming is to split the problem into multiple sub-problems of the same form and smaller scale, and then split the sub-problems until the sub-p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com