Intelligent steering control method for electric vehicles with dual hub motors
A motor electric and intelligent steering technology, applied in the field of vehicle driving stability control, can solve the problems of not being able to guarantee the stability of the entire vehicle during steering, the real-time steering requirements, the requirements for safe steering, and poor robustness at the same time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
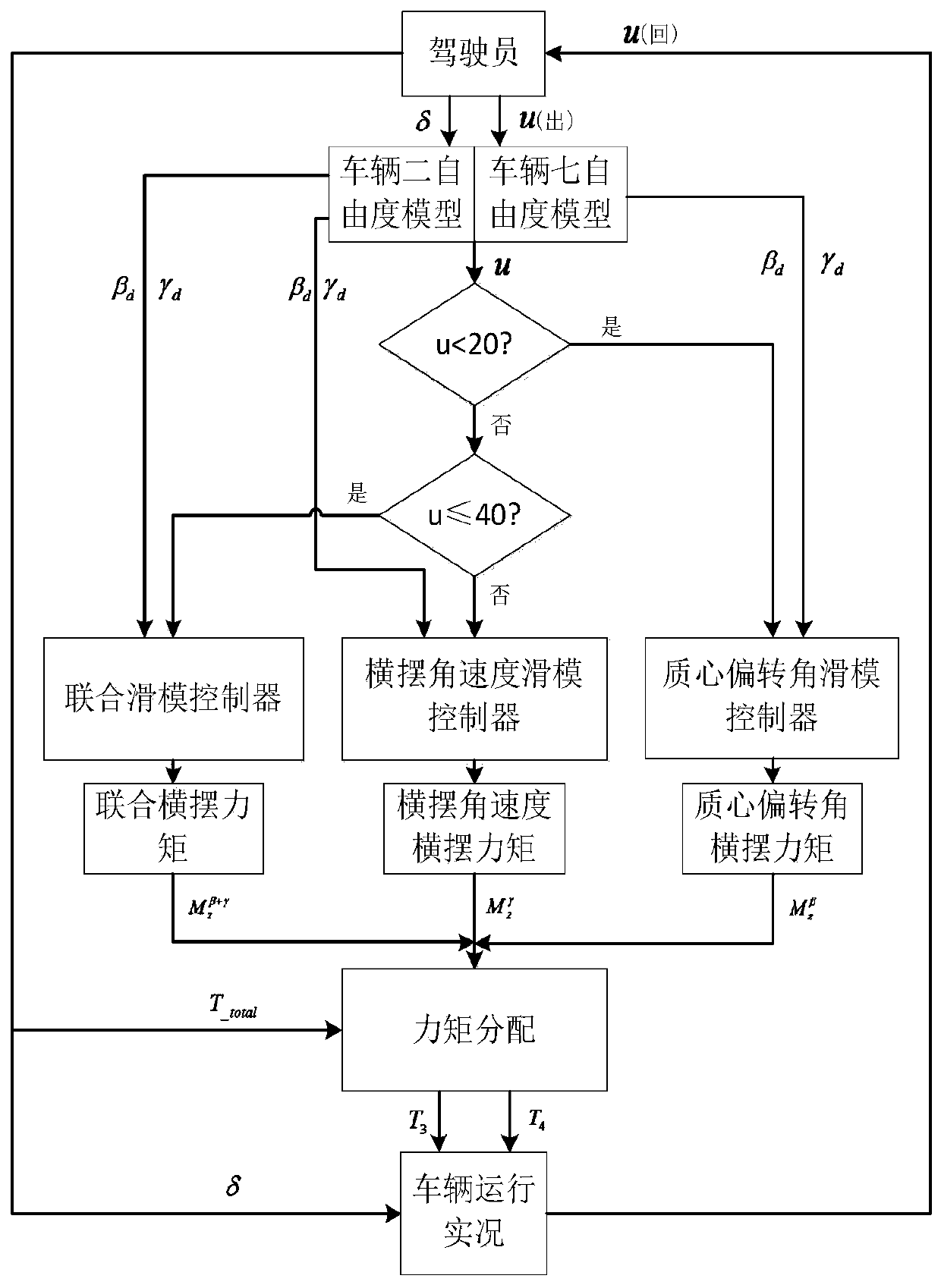
[0090] This embodiment is an intelligent steering control method for an electric vehicle with dual hub motors. A gradient strategy is applied to deal with the steering situation at different vehicle speeds. By corresponding to different sliding mode controllers and through torque distribution, intelligent steering control is achieved. The specific steps are as follows :
[0091] The first step is to divide the speed stage:
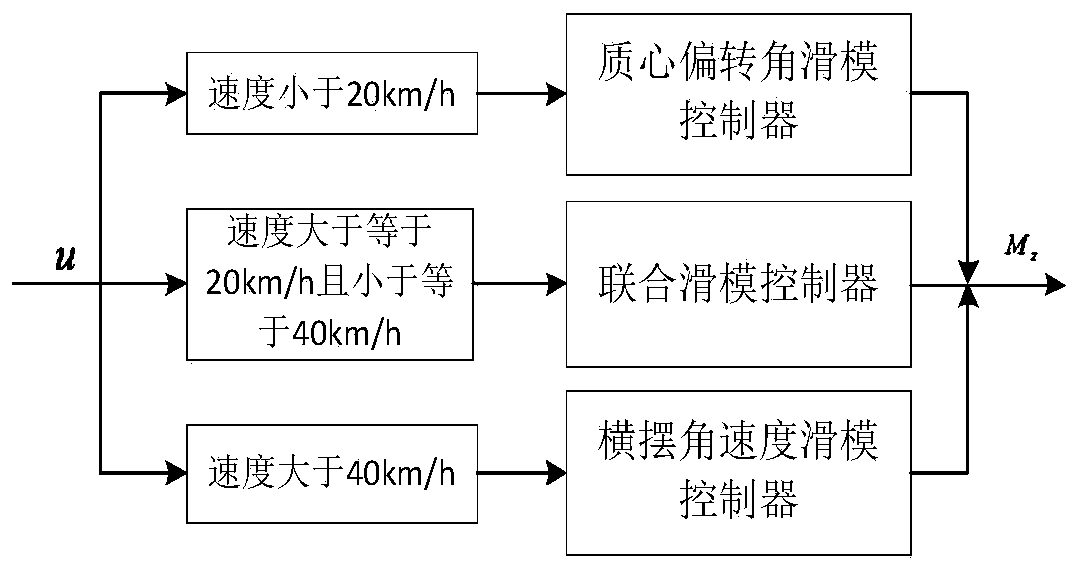
[0092] Divide the vehicle speed into three stages: the low-speed stage is when the speed is less than 20km / h, the medium-speed stage is when the speed is greater than or equal to 20km / h and less than or equal to 40km / h, and the high-speed stage is when the speed is greater than 40km / h;
[0093] The second step is to obtain the ideal centroid deflection angle β d and the ideal yaw rate γ d :
[0094] Taking the vehicle speed and steering angle as input, the ideal center-of-mass deflection angle β is obtained through the vehicle two-degree-of-freedom mode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com