Virtual reality-based industrial robot simulation and real-time control system
A real-time control system, industrial robot technology, applied in general control systems, control/regulation systems, simulators, etc., can solve problems such as unsatisfactory direct communication, achieve convenient diagnosis and maintenance, realize visual control and real-time monitoring, The effect of great practical value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0014] The following non-limiting examples can enable those skilled in the art to understand the present invention more fully, but do not limit the present invention in any way.
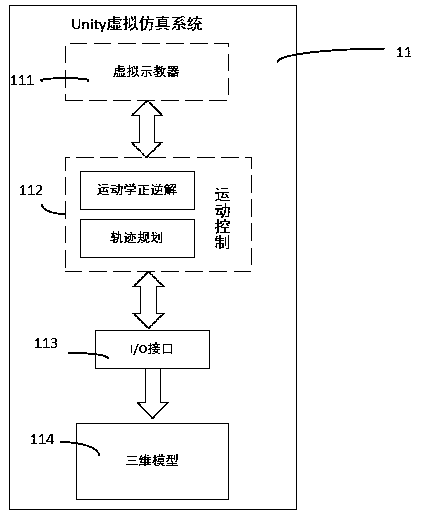
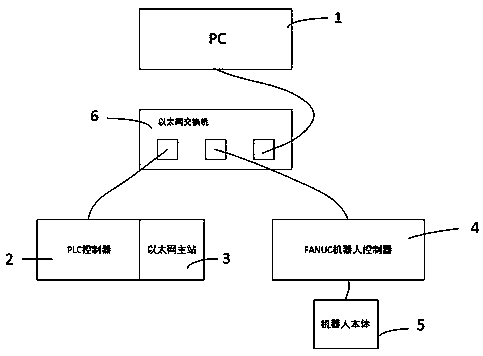
[0015] see Figure 1-3 , the present invention provides a technical solution: a virtual reality-based industrial robot simulation and real-time control system, including: a Unity virtual simulation system, a PLC data communication system, and a FANUC robot; the Unity virtual simulation system (11) includes: a computer (1 ), virtual teaching device (111), motion control module (112), I / O interface (113), 3D model (114); PLC data communication system includes: OPC server (12), PLC data gateway (13), PLC controller (2), PLC Ethernet master module (3), Ethernet switch (6); FANUC robot includes: FANUC robot controller (4), FANUC robot body (5). The computer (1), the PLC controller (2), the PLC Ethernet master module (3), the FANUC robot controller (4) and the Ethernet switch (6) are connected to each oth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com