A sliding mode control method for hysteretic nonlinear servo motor system
A hysteresis nonlinear, servo motor technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as numerous parameters and complex models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The present invention is described in detail below by specific embodiment:
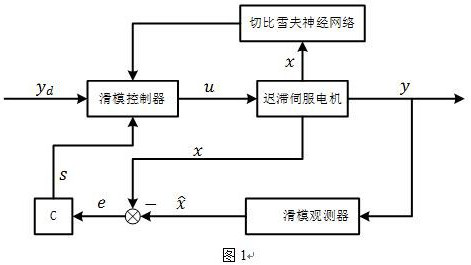
[0056] Such as figure 1 As shown, the overall design idea of the present invention is: first convert the hysteresis servo motor system model into a state space form, wherein the hysteresis nonlinear link adopts the Backlash-like model. Unlike other methods, the present invention does not directly solve the Backlash-like model Instead of analyzing the solution, the Backlash-like model is integrated into the system state space model and processed together as a new state variable. The sliding mode state observer is designed to observe the unknown state of the hysteresis servo motor system, and the unknown disturbance of the system is estimated according to the Chebyshev neural network. Then, according to the defined error function and sliding mode surface, a sliding mode controller is designed to accurately control the hysteresis servo motor system.
[0057] The specific design steps are as follo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com