Space-deformable truss inverse kinematic calculation method and system
A technology of inverse kinematics and calculation methods, applied in calculation, design optimization/simulation, image data processing, etc., can solve problems that are difficult to solve, and the amount of calculations in multi-level truss inverse kinematics is large
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
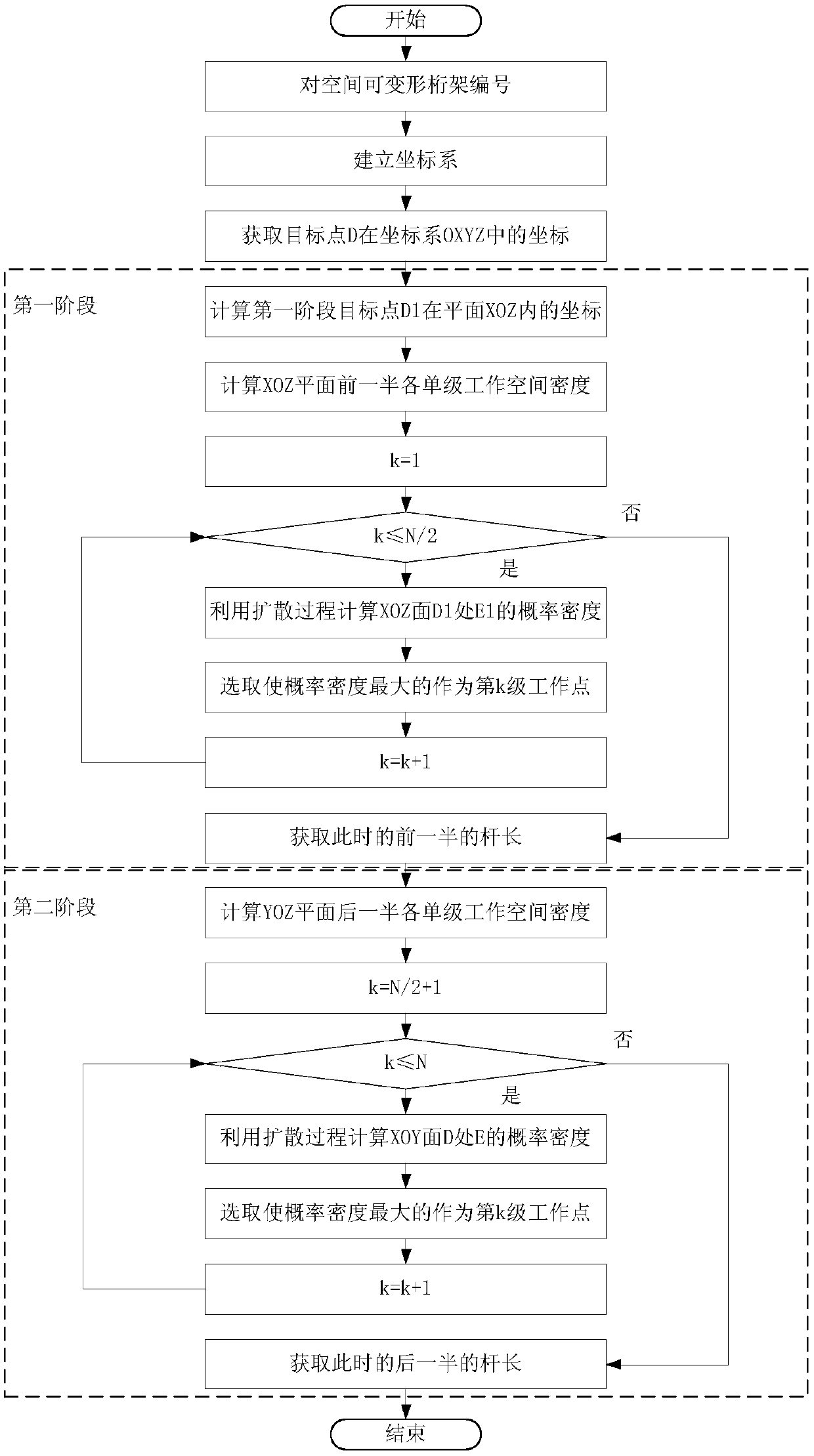
[0205] Taking the inverse kinematics of a deformable truss in a certain space as an example, the number of truss series is N=6, the length of the fixed rod is w=1m, and the expected terminal working point D(-2,-2,8) is given.
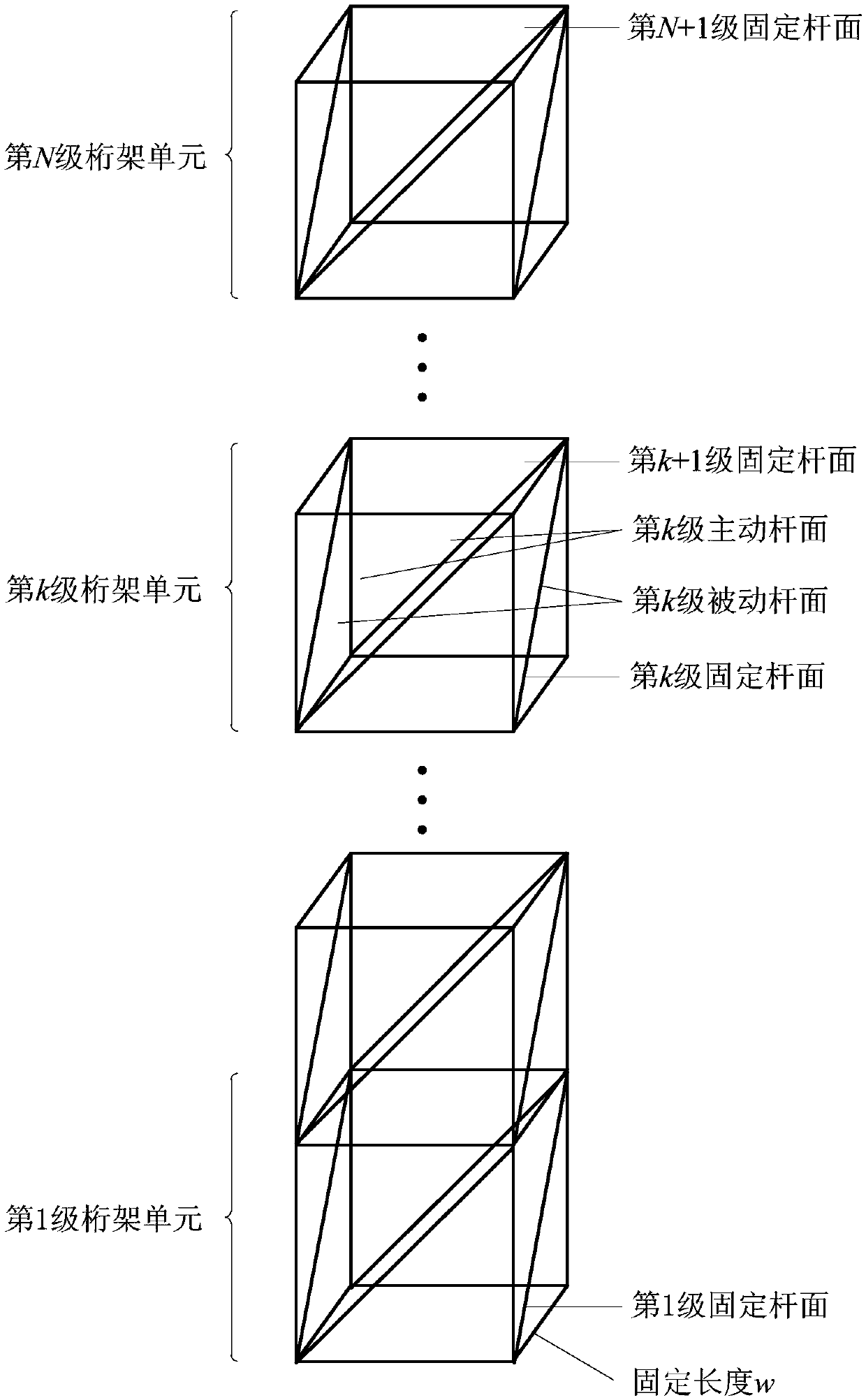
[0206] First, number the truss units at all levels and establish a coordinate system. In the original length state, the truss is vertical. In the 1st to 3rd truss units, the two sides parallel to the XOZ plane are the active rod faces that move synchronously, and the two sides parallel to the YOZ are the passive rod faces; in the 4th to 6th truss units, the The two sides of the club are active club faces that move synchronously, and the two sides parallel to the XOZ plane are passive club faces.
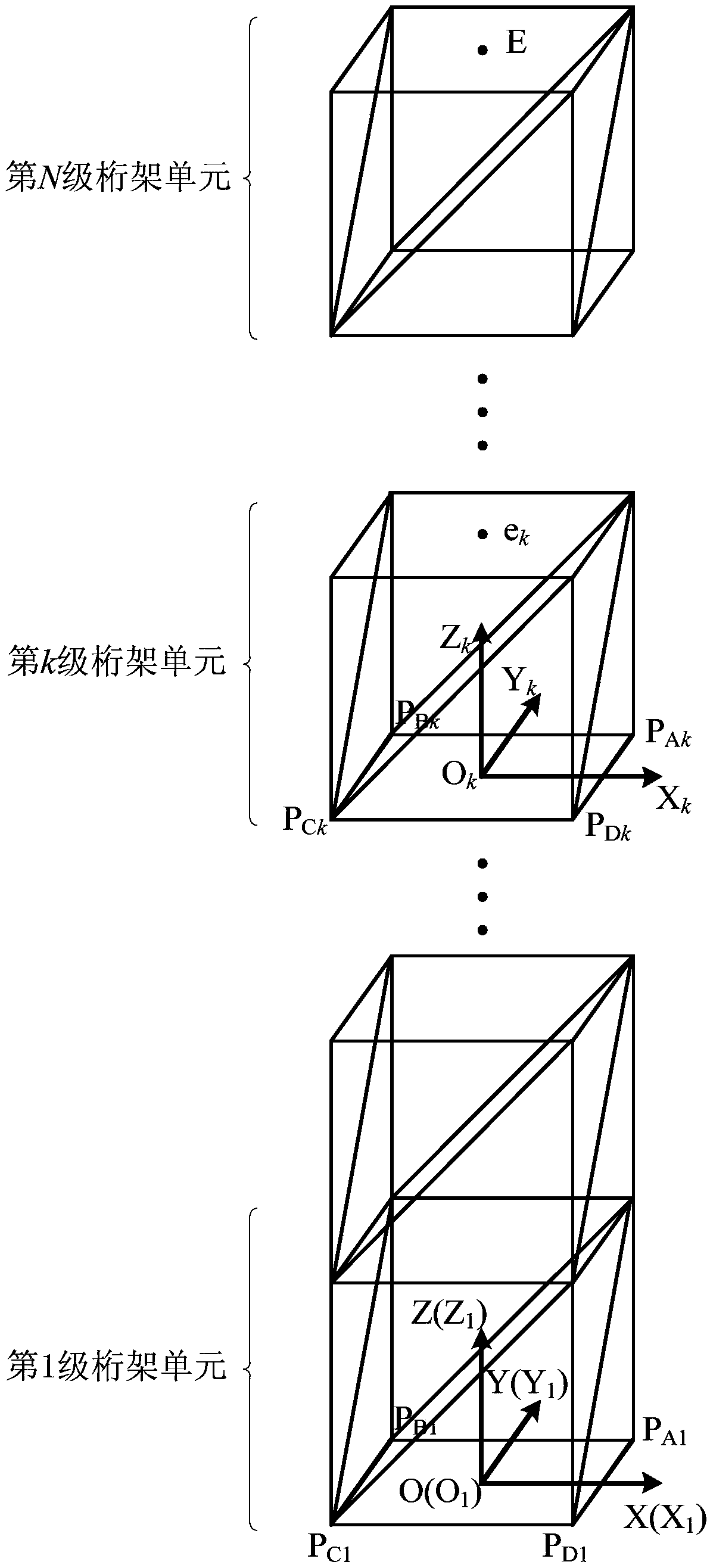
[0207] Set the target point D of the first stage 1 (-2,0,4), working point E of the third-level truss element 1 . Keeping the y-axis coordinates unchanged, calculate the projection of the 1st to N / 2-level truss elements on the XOZ plane. Firstly, calculat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com