Four-degree-of-freedom parallel connection mechanism
A degree of freedom and parallel technology, applied in the field of robotics, can solve the problems of large space size and redundant degrees of freedom, etc., and achieve the effect of improving control algorithm error, eliminating redundant degrees of freedom, and easy installation and manufacturing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
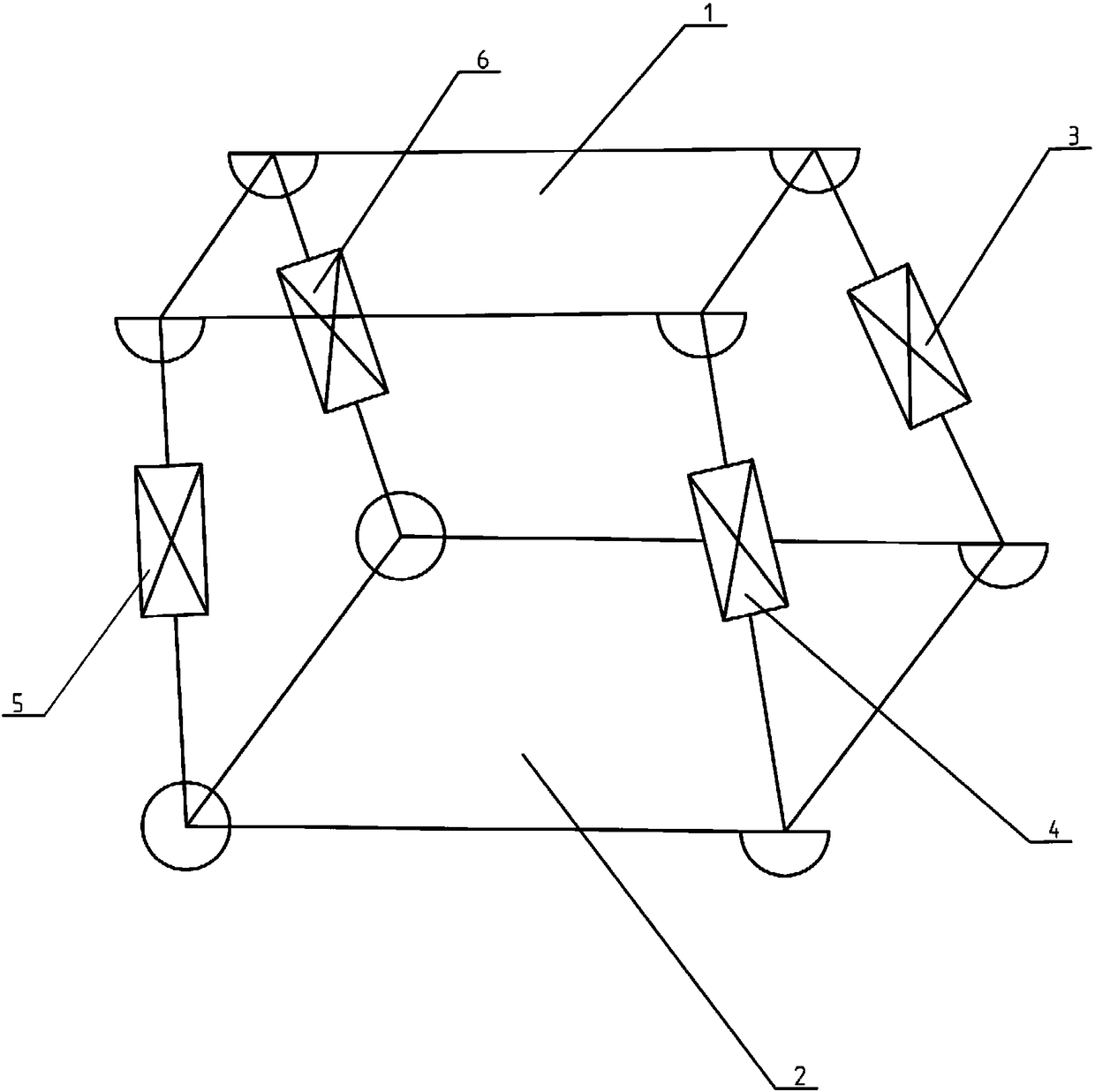
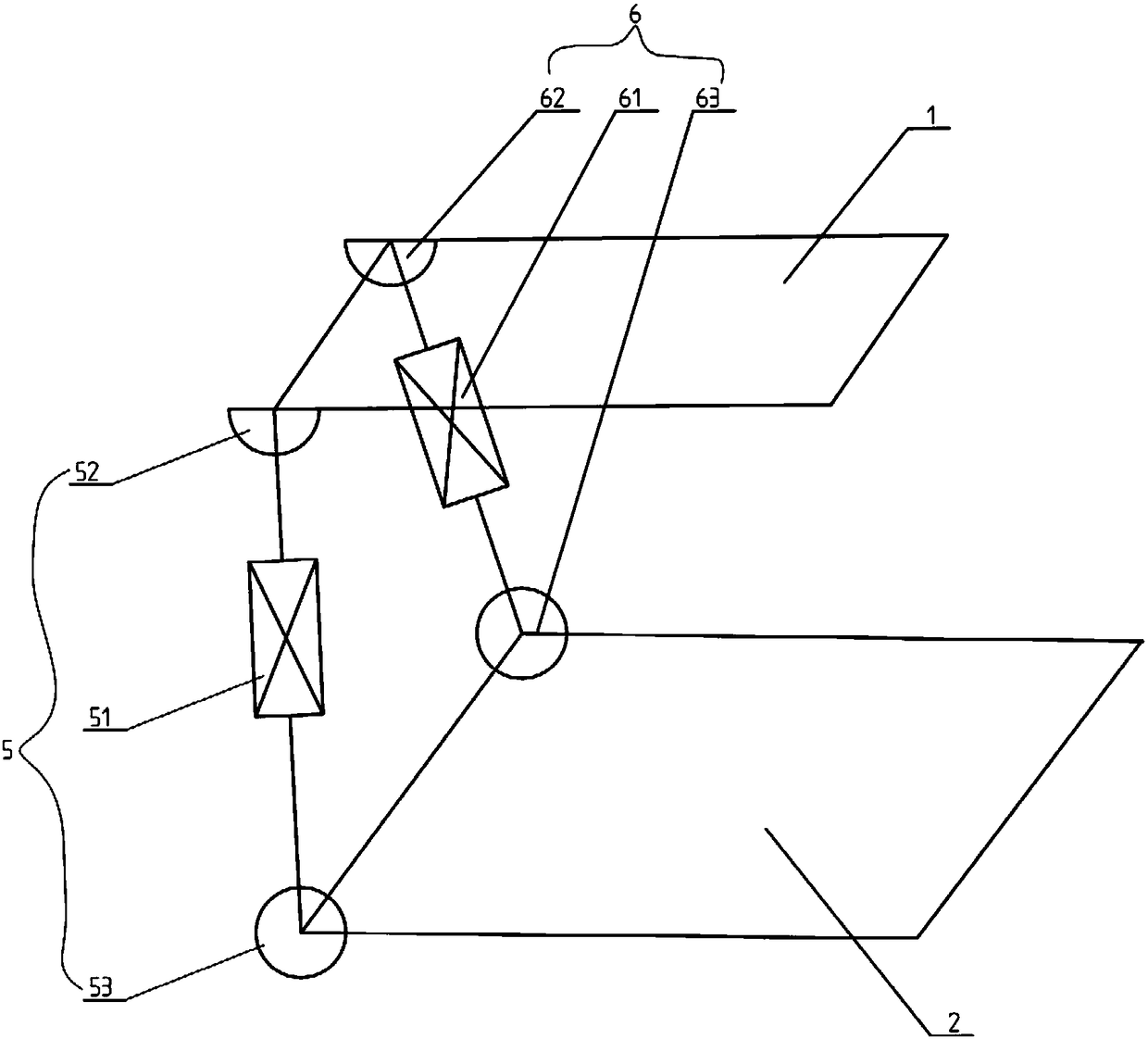
[0051] See figure 1 , figure 2 , image 3 , Figure 4 , a four-degree-of-freedom parallel mechanism, including a dynamic platform 1 and a static platform 2 arranged at intervals up and down, four kinematic branch chains are connected between the dynamic platform 1 and the static platform 2, and the four kinematic branch chains include the first kinematic branch chain 3 , the second kinematic branch chain 4, the third kinematic branch chain 5 and the fourth kinematic branch chain 6, the first kinematic branch chain 3 and the second kinematic branch chain 4 are adjacent to form the first group of kinematic chains, the third kinematic branch chain 5 The second group of kinematic chains is formed adjacent to the fourth kinematic branch chain 6 . In addition, four points on any section of the first group of kinematic chains and the second group of kinematic chains can be connected end to end in turn to form a quadrilateral.
[0052] The two kinematic branch chains in the first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com