Motion control method of mobile robot chassis and mobile robot chassis
A mobile robot and motion control technology, applied in the control drive, control device, power steering mechanism, etc., can solve the problems of low precision of mobile robot chassis motion control and control error of mobile robot chassis, so as to reduce mechanical errors and reduce control Error, the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
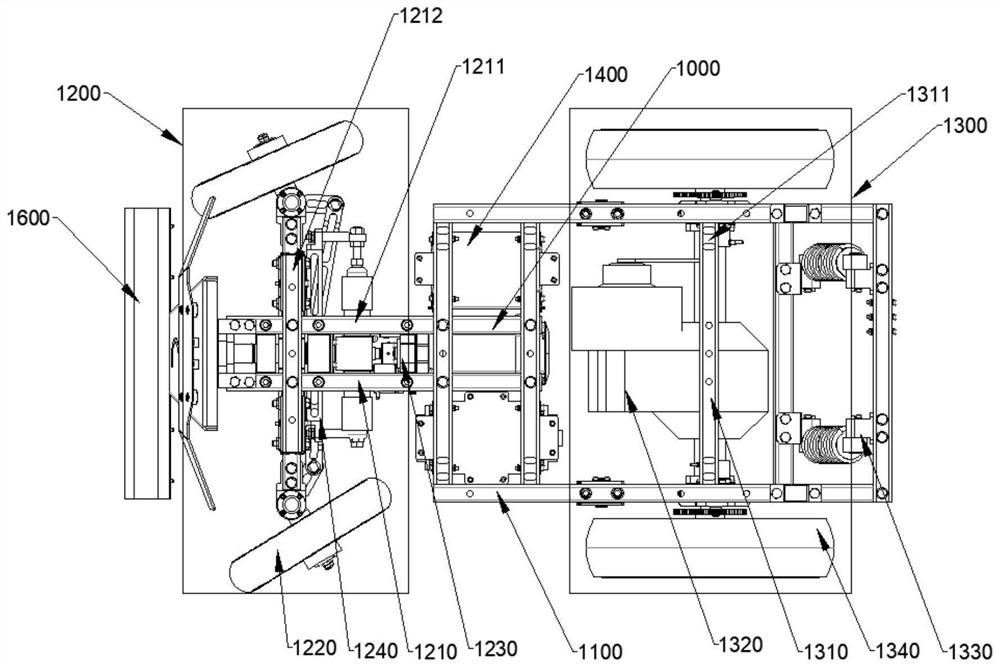
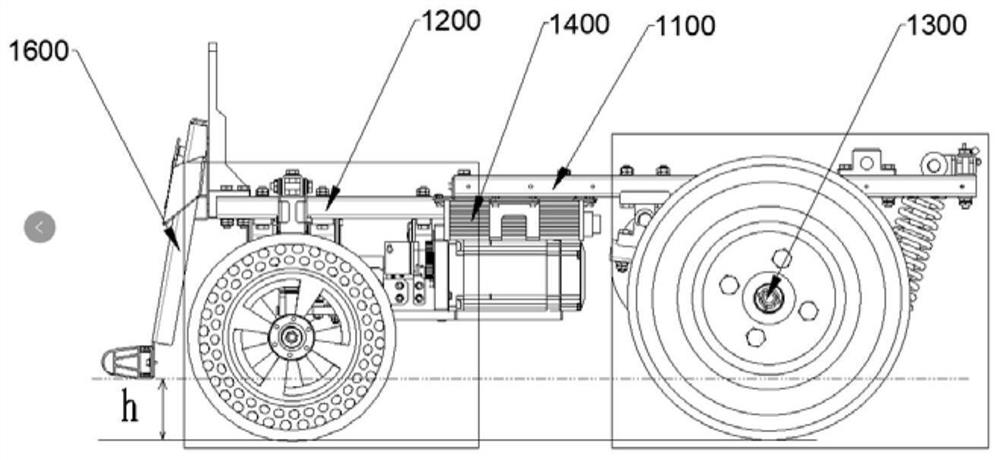
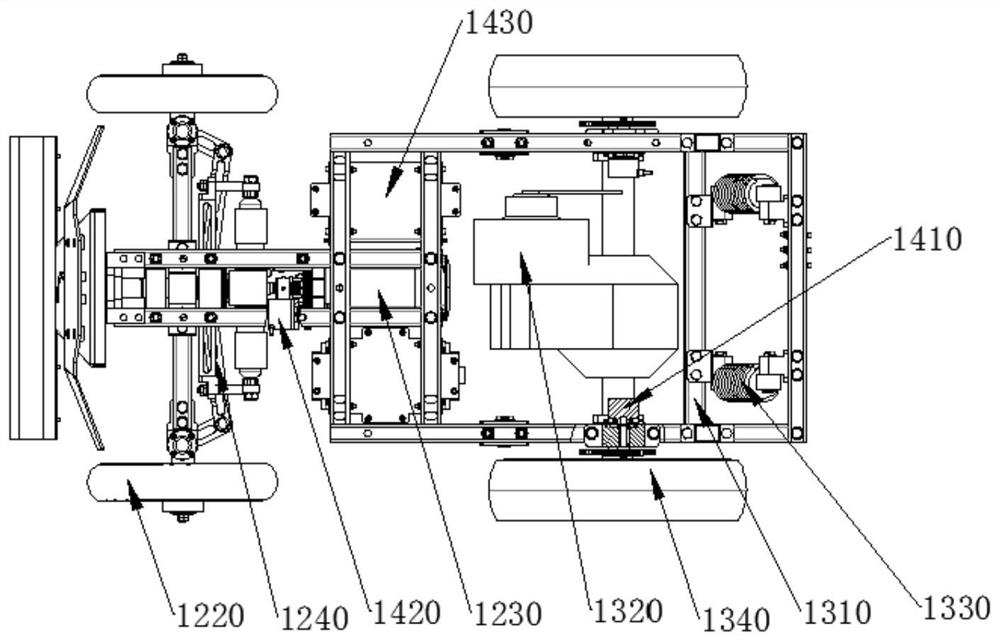
[0055] The following will be combined with Figure 1 to Figure 8 , a method for controlling motion of a mobile robot chassis provided in an embodiment of the present application is introduced in detail.
[0056] see Figure 4 and Figure 5 , the motion control method of described mobile robot chassis, comprises the steps:
[0057] Step S101: Obtain the rotational angular velocity of the two rear wheels of the chassis and the steering angle of the front wheel steering drive motor;
[0058] In an exemplary embodiment of the present application, rotary encoders are respectively fixed on the two rear wheels of the chassis to obtain the rotational angular velocity of the two rear wheels; a steering encoder is fixed on the steering drive motor of the front wheels of the chassis to obtain Get the steering angle of the front wheel steering drive motor.
[0059] Step S102: Obtain the steering angle of the front wheels according to the steering angle of the front wheel steering driv...
Embodiment 2
[0114] The following are device embodiments of the present application, which can be used to implement the method embodiments of the present application. For details not disclosed in the device embodiments of the present application, please refer to the method embodiments of the present application.
[0115] see Figure 9 , which shows a schematic structural diagram of a motion control device for a mobile robot chassis provided by an embodiment of the present application. The motion control device 200 of the mobile robot chassis provided in the embodiment of the present application includes:
[0116] The chassis state acquisition module 210 is used to acquire the rotational angular velocity of the two rear wheels of the chassis and the steering angle of the front wheel steering drive motor;
[0117] The front wheel steering angle acquisition module 220 is configured to obtain the steering angle of the front wheels according to the steering angle of the front wheel steering d...
Embodiment 3
[0139] The following are device embodiments of the present application, which can be used to implement the method embodiments of the present application. For details not disclosed in the device embodiments of the present application, please refer to the method embodiments of the present application.
[0140] see Figure 12, the present application also provides an electronic device 300 , the electronic device 300 may include: at least one processor 301 , at least one memory 302 , at least one network interface 303 , user interface 304 and at least one communication bus 305 .
[0141] Wherein, the user interface 304 is mainly used to provide an input interface for the user to obtain the data input by the user, which may include a display terminal and a camera terminal; the display terminal includes a display layer and a touch layer, and the display layer is used for Display the data processed by the processor; the touch layer can include: a capacitive screen, an electromagneti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com