Novel electric vehicle charging service system based on guiding belt and robot
A technology for electric vehicles and charging services, applied in the direction of electric vehicle charging technology, electric vehicles, charging stations, etc., can solve the problems of difficult charging and difficult charging of electric vehicles, and achieve the effect of convenient charging and solving charging difficulties.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
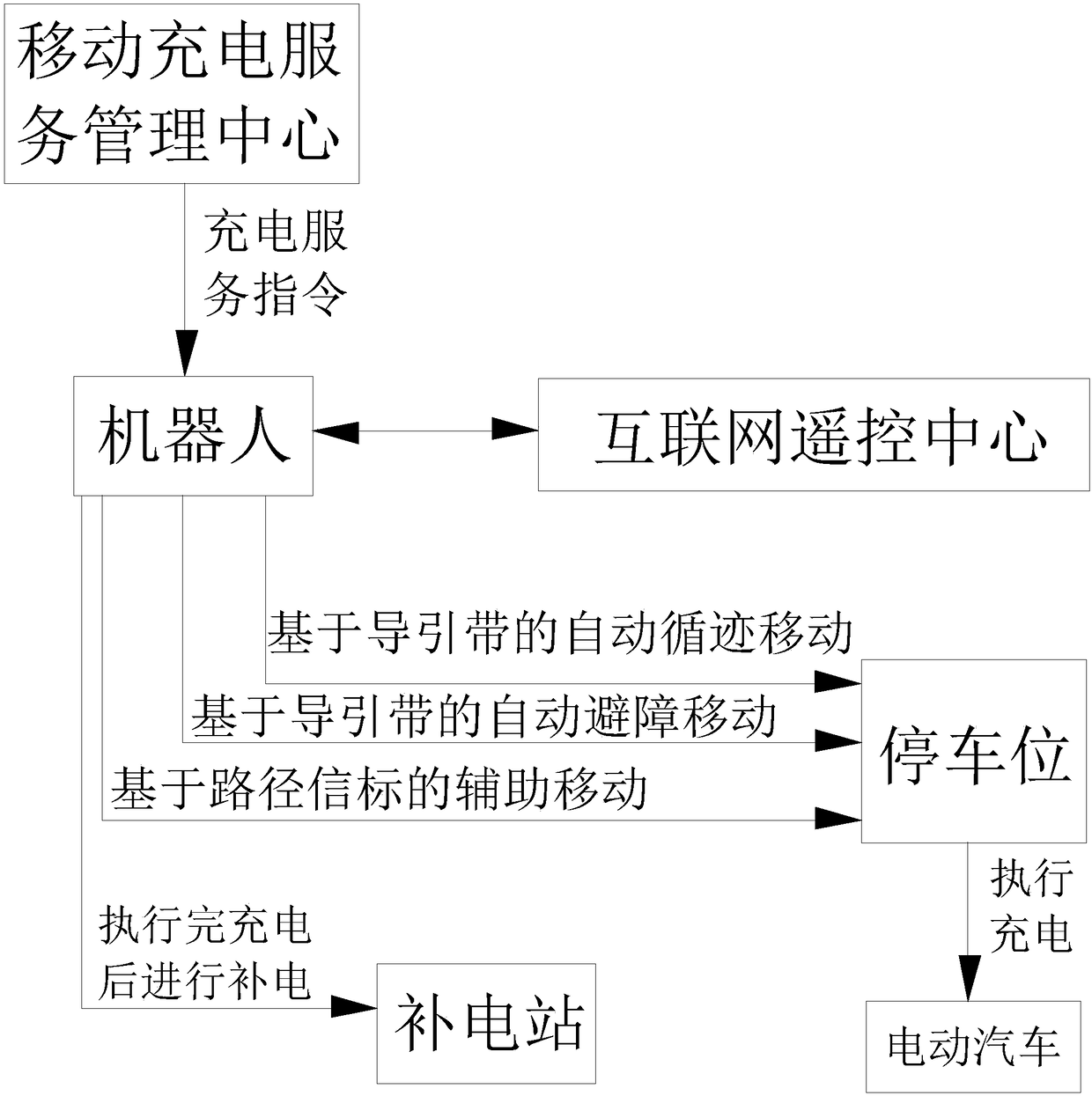
[0037] refer to Figure 8 , the robot 3 includes a motor, a cloud camera, an obstacle avoidance sensor, a digital camera, an ultrasonic ranging module, a reminder module, a scale digital identification module based on the guide belt 1, a beacon identification module, a power supply contact area, and a lithium battery pack, etc. , and a main control module for overall control is installed inside it, and the main control module is connected to each of the above-mentioned modules or structures; the general size specification of the robot 3 is: 0.5 meters long, 0.5 meters wide, and the size is close to an ordinary refrigerator. It has charging service ports for slow charging and fast charging, and also has an operation panel with fine-tuning of the position, and the user can fine-tune its position to make it more convenient to charge the electric vehicle 2.
[0038] Among them, the Internet remote control center is used to assist the robot 3 to move according to the path plan, and...
Embodiment 2
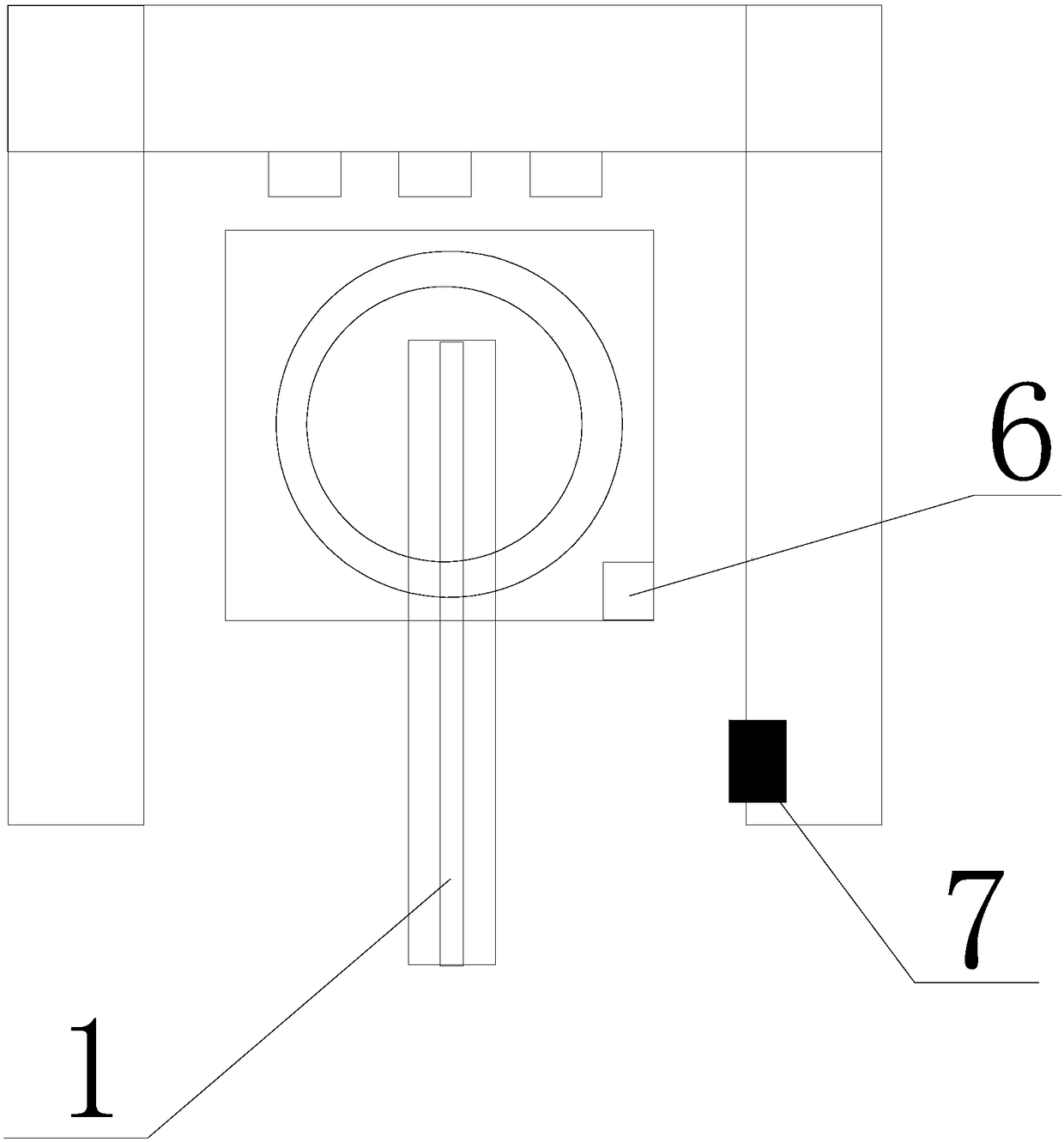
[0056] Compared with Embodiment 1, the robot 3 directly locates the guide belt 1 at the bottom of the electric vehicle 2 and obtains its relevant information, and realizes arriving at the parking space by moving the guide belt 1 at the bottom of the electric vehicle 2, and only needs to pass through quickly. Charging the service port just can realize charging for electric vehicle 2. The moving mode, obstacle avoidance process and power supply process are the same as those in the first embodiment, and will not be repeated here, but the guide belt 1 referred to has changed from the guide belt 1 on the ground to the guide belt 1 arranged at the bottom of the electric vehicle 2 .
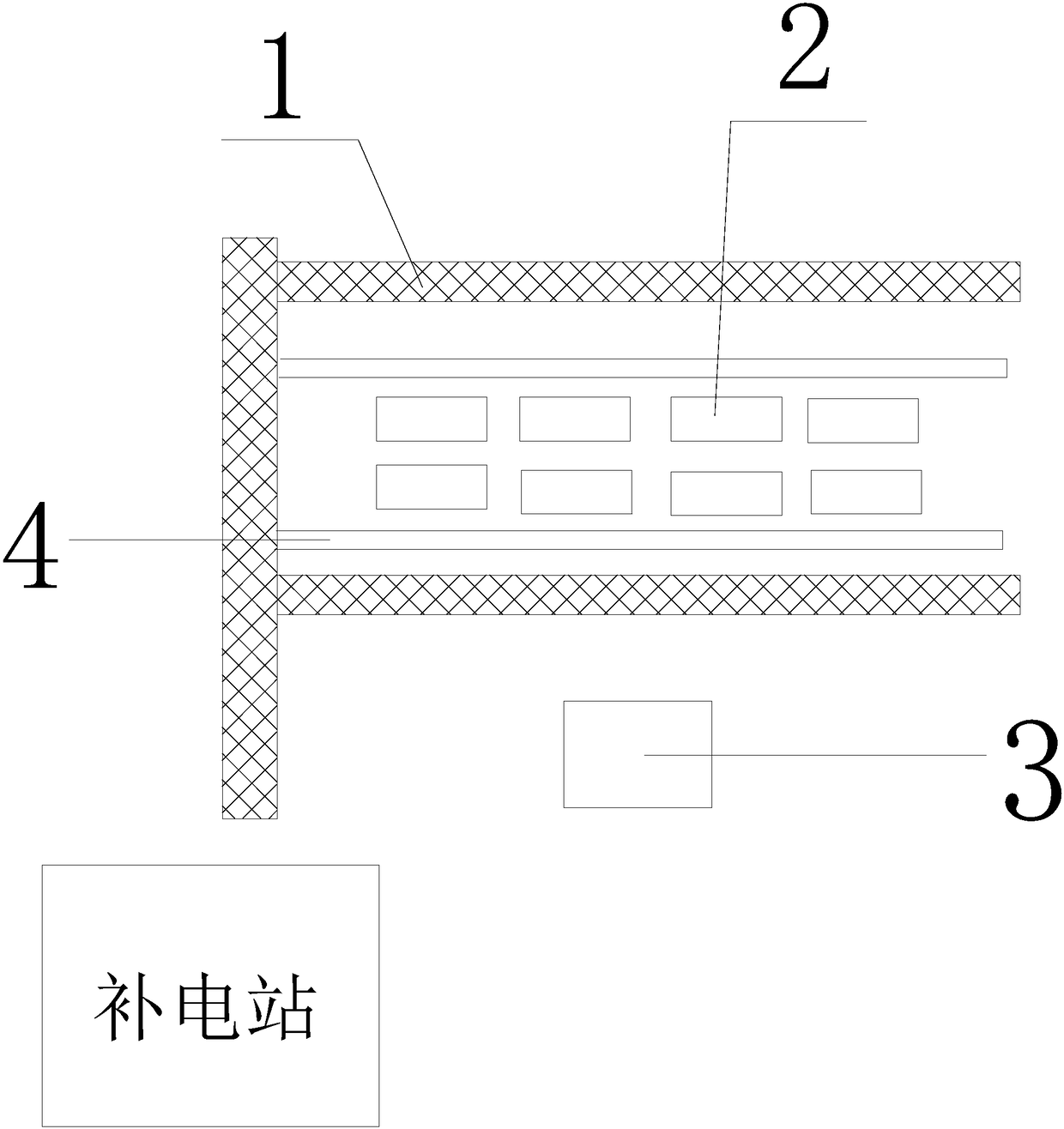
[0057] Specifically, refer to Figure 9 and Figure 10 , in order to adapt to the space at the bottom of the electric vehicle 2, the size of the robot 3 in this case, that is, the length, width and height can be 0.6m, 0.6m and 0.1m, or 0.4m, 1.5m and 0.1m, Or 0.3m, 1.5m and 0.1m, can carry 8kwh, 13kw...
Embodiment 3
[0063] Compared with Embodiment 1 and Embodiment 2, the robot 3 can move based on the guide belt 1 on the ground and the guide belt 1 at the bottom of the electric vehicle 2 at the same time, for example, the guide belt 1 on the ground can be used as a For the reference of the parking space, the guide belt 1 at the bottom of the electric vehicle 2 can be used as a reference for returning to the power supply station, and the robot 3 can be remotely controlled through the Internet remote control center; The same as above, will not go into details here, just refer to the guide belt 1 from the ground guide belt 1 to the ground guide belt 1 and the guide belt 1 arranged at the bottom of the electric vehicle 2 .
[0064] refer to Figure 9 , Embodiments 1, 2 and 3 can be selected and used, and are not limited. For example, because sometimes there are too many obstacles on the sidewalk 4, it may take a lot of time to avoid obstacles. At this time, based on the guidance at the bottom ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com