


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Double-end traveling wave distance measuring method based on fault waveform initial point step-out time
A double-terminal traveling wave and fault location technology, which is applied in the direction of fault location, measuring electricity, and measuring devices, can solve the problem of low positioning accuracy of the frequency response bandwidth of the traveling wave sensor and achieve the effect of reducing the positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0052] According to the aforementioned principle of double-terminal traveling wave fault location and the principle of calculating the starting point of the fault traveling wave waveform, a method of double-terminal traveling wave fault location based on the time difference of arrival at the starting point of the waveform is obtained, including the following steps:
[0053] S31: Obtain the traveling wave waveform data of the M-terminal and N-terminal of the transmission line and perform zero-phase-shift digital filtering processing to obtain i M (t), i N (t);
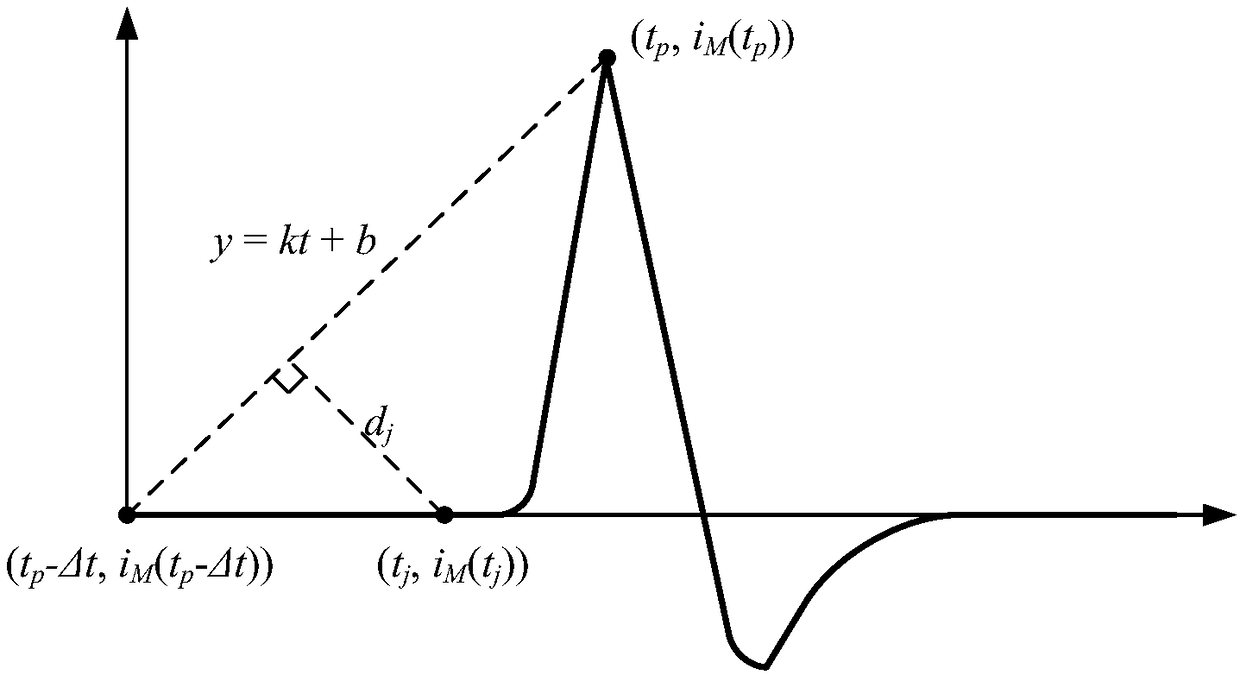
[0054] S32: calculate i M (t), i N (t) The waveform points corresponding to the maximum absolute value are (t p ,i M (t p )), (t q ,i N (t q ));
[0055] S33: Set the time coordinate axis offset parameter Δt, and calculate i M (t), i N The reference points when the waveform starting point of (t) has not yet reached are (t p -Δt,i M (t p -Δt)), (t q -Δt,i N (t q -Δt));
[0056] S34: connect(t p -Δt,i ...
Embodiment 2
[0065] In the step S31 of embodiment 1, the method that the traveling wave waveform data is carried out zero phase shift digital filtering comprises the following steps:
[0066] Step S41: reverse the sequence s(n) formed by the acquired traveling wave waveform data in the time domain to obtain:
[0067] u(n)=s(K-1-n)
[0068] Among them, s(n)={s(0),s(1),…,s(K-1)}, n=0,1,2,…,K-1 is a discrete signal, K is s(n ), u(n) is the sequence of s(n) flipped in the time domain;
[0069] Step S42: Perform low-pass filtering on the sequence u(n), and use the unit impulse response sequence to perform convolution with the sequence u(n):
[0070] v(a)=u(n)*h(m)
[0071] Among them, v(a) is the low-pass filtered sequence of u(n), h(m) is the unit impulse response sequence, a=0,1,2,...,K+f-2, m=0,1 ,2,...,f-1, f is the number of points in the unit impulse response sequence h(m);
[0072] Step S43: reverse the sequence v(a) obtained in step S42 in the time domain:
[0073] w(a)=v(K+f-1-a)...
Embodiment 3
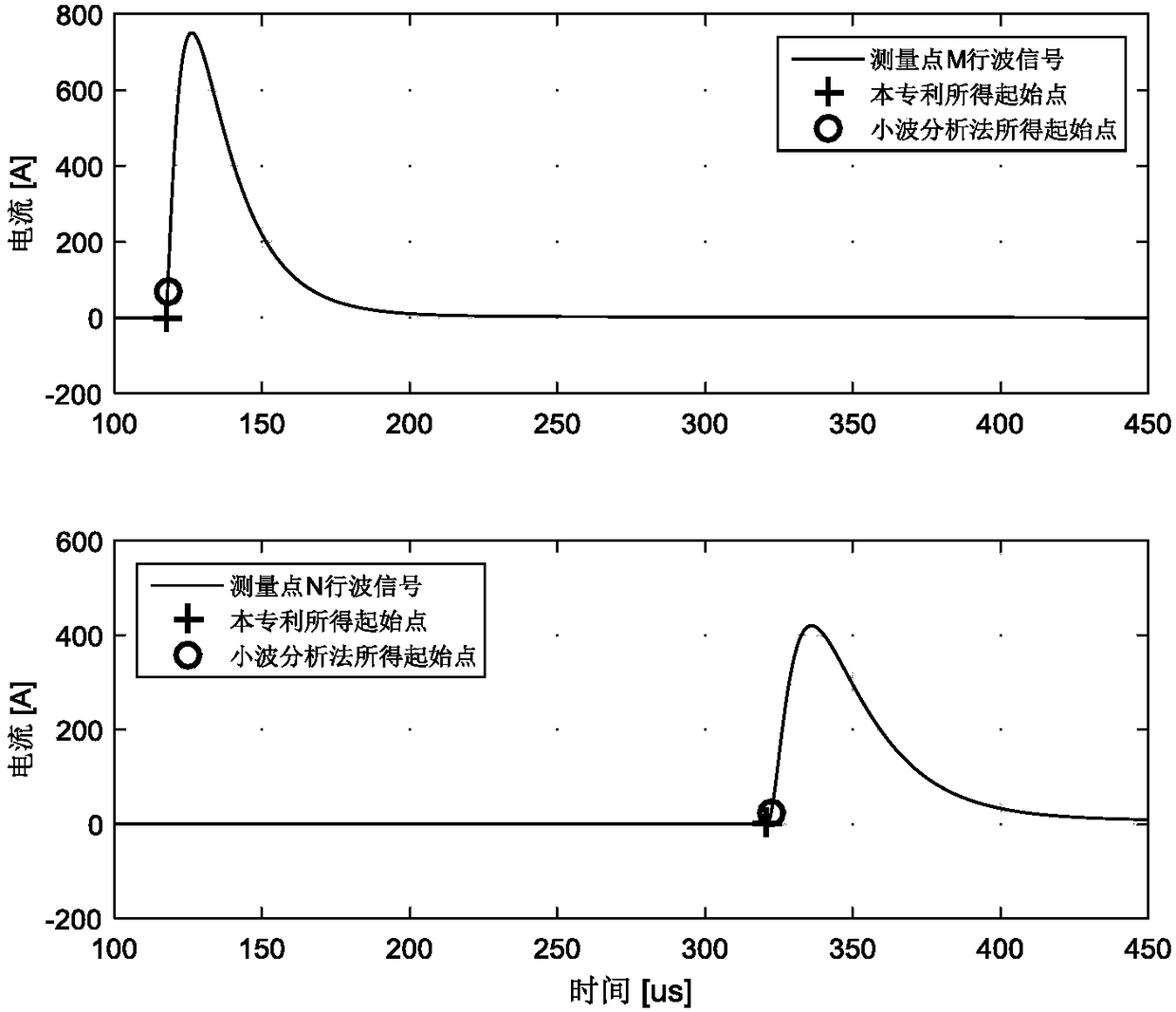
[0083] In order to show the influence of this method on eliminating dispersion and other factors more intuitively, the fault distance measurement of cable transmission line is simulated by using PSCAD software, and the present invention is compared with the traditional traveling wave distance measurement method based on wavelet analysis algorithm.
[0084] The simulation model is that the transmission line adopts a three-core XLPE cable with a total length of 50 kilometers. At a distance of 40 kilometers to the left of point N (or 10 kilometers to the right of point M), the core wire of phase A is injected based on a double-exponential model. The traveling wave pulse, as the point of failure. The traveling wave data is monitored at both ends of M and N, and the traveling wave ranging simulation waveform diagram of the traveling wave starting point is obtained by using the present invention and the wavelet analysis method respectively. image 3 shown.
[0085] Calculated accor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com