Automatic driving environmental perception system based on vehicle-road coordination
An automatic driving and environment perception technology, applied in the field of automatic driving environment perception system, can solve the problems of large impact on sensor performance of perception range, difficult to fuse sensor data, easy to disassemble, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solution of the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments, and the following embodiments do not constitute a limitation of the present invention.
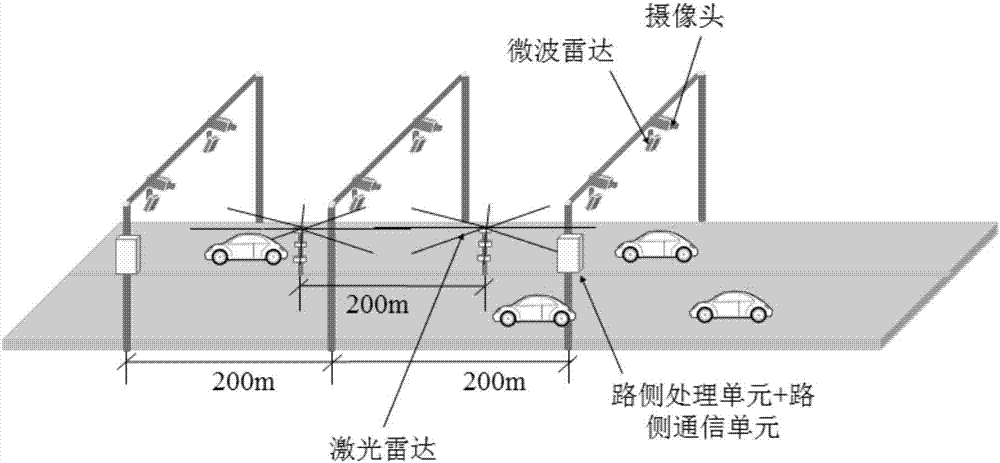
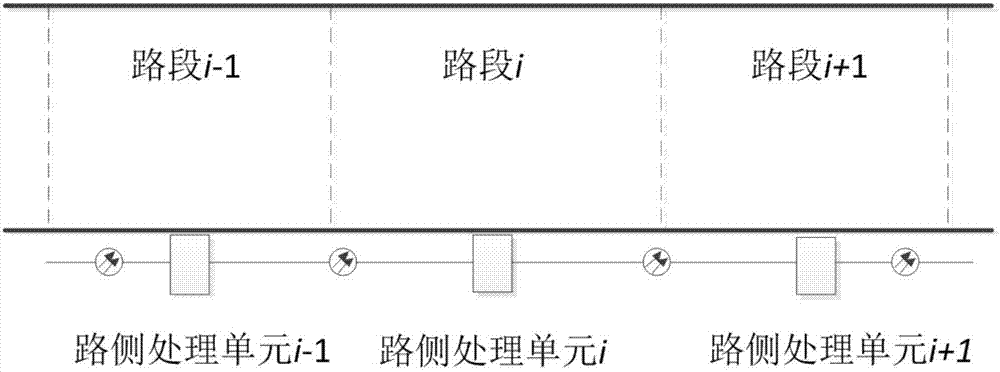
[0040] The rapid development of communication technology has made low-latency communication between vehicles and between vehicles and infrastructure a reality. Traditional DSRC and short-range communication technologies such as LTE-V2X, which are rapidly developing at this stage, have been able to achieve communication with a delay of less than 100 milliseconds between vehicles and between vehicles and infrastructure. In the future 5G era, the delay will reach 1 millisecond. The development of short-distance, low-latency communication technology provides a new way of thinking for the realization of autonomous driving. This technical solution is based on the construction of an environmental perception system on the roadside, and trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com