Self-adaptive cruising method and system
An adaptive cruise and self-adaptive technology, applied in the control device and other directions, can solve the problem of unable to display the potential following target in front of the vehicle, unable to prompt the driving trend of the vehicle status, etc., to achieve a good sensory experience and enhance the display effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
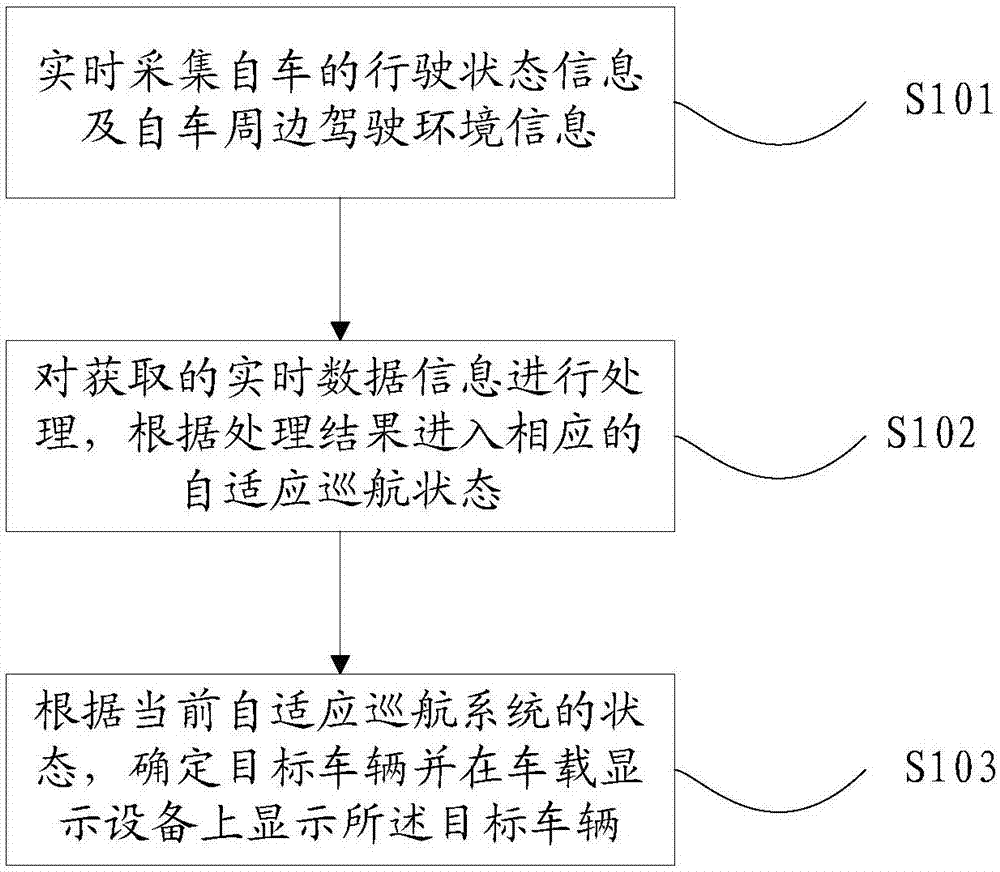
[0042] This embodiment provides an adaptive cruise method, such as figure 1 shown, including:
[0043] S1. Real-time collection of the driving status information of the own vehicle and the surrounding driving environment information of the own vehicle.
[0044] Specifically, the driving state information includes wheel speed, steering angular velocity, and acceleration, and the surrounding driving environment information includes the number of lanes, the lane where the ego vehicle is located, and target vehicle information, and the target vehicle information includes the target vehicle and the ego vehicle. The relative speed, relative distance and relative azimuth angle of the vehicle.
[0045] S2. Process the acquired real-time data information, and enter a corresponding adaptive cruise state according to the processing result.
[0046] S3. According to the state of the current adaptive cruise system, determine the target vehicle and display the target vehicle on the vehicl...
Embodiment 2
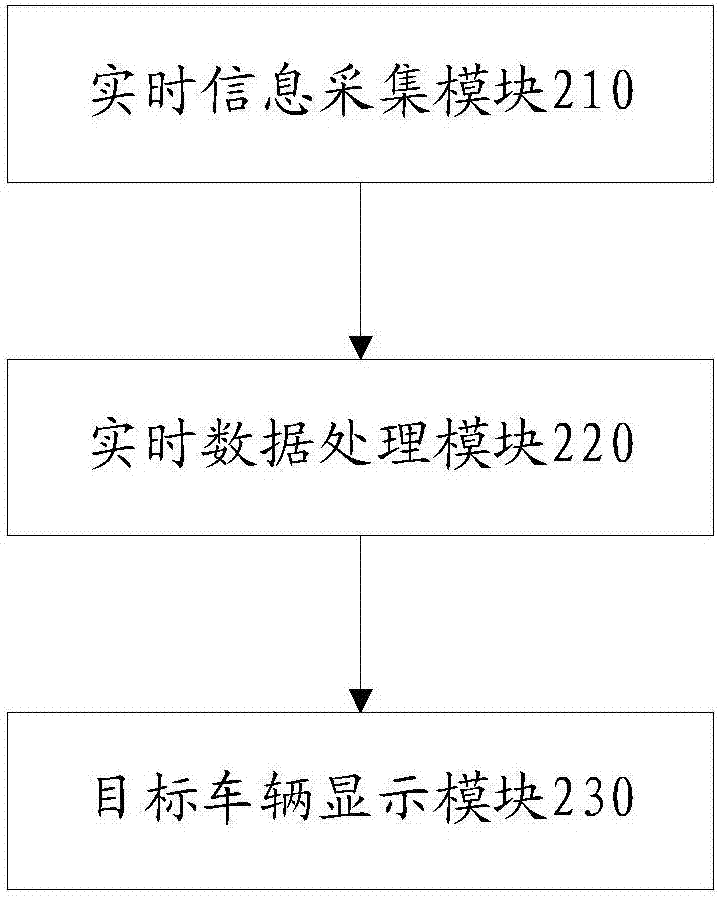
[0075] This embodiment provides an adaptive cruise system, such as figure 2 shown, including:
[0076] The real-time information collection module 210 is used to collect the driving state information of the own vehicle and the surrounding driving environment information of the own vehicle in real time.
[0077] Wherein, the driving state information includes wheel speed, steering angular velocity, and acceleration, and the surrounding driving environment information includes the number of lanes, the lane where the own vehicle is located, and target vehicle information, and the target vehicle information includes the relative distance between the target vehicle and the own vehicle. Speed, relative distance and relative bearing angle.
[0078] The real-time data processing module 220 is configured to process the acquired real-time data information, and enter a corresponding adaptive cruise state according to the processing result.
[0079] The target vehicle display module 23...
Embodiment 3
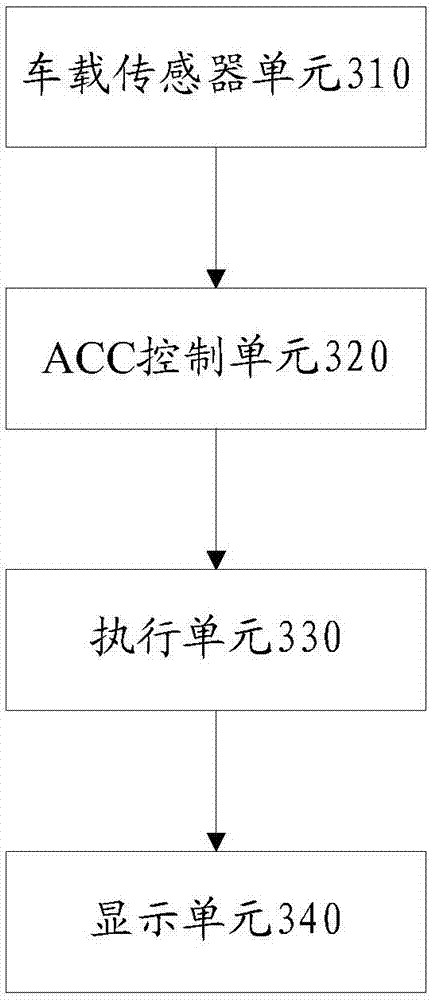
[0091] This embodiment provides an adaptive cruise control system, such as image 3 shown, including:
[0092] The on-vehicle sensor unit 310 is used for sensing information such as the driving state of the own vehicle and the surrounding driving environment.
[0093] The ACC control unit 320 is the core unit of the system, which is used to process the driving information and determine the control command of the vehicle.
[0094] The execution unit 330 is composed of a brake pedal, an accelerator pedal and an actuator of the vehicle transmission system, and is used to realize the acceleration and deceleration of the vehicle.
[0095] The display unit 340 is used for displaying set system parameters, system status and vehicle information.
[0096] The vehicle-mounted sensor can be a vehicle-mounted radar, and the function of the radar is to measure information such as relative vehicle speed, relative vehicle distance, and relative azimuth. Based on the characteristics of rad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com