A base disturbance calculation method for a free-floating robot in space
A calculation method and robot technology, applied in the direction of manipulators, artificial satellites, complex mathematical operations, etc., can solve problems such as large amount of calculation, unfavorable real-time online calculation and prediction, etc., to reduce the amount of numerical calculation, avoid inversion judgment and singularity processing , to ensure the effect of non-singularity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0040] The invention can be applied to a space vehicle system or a space robot system with a space manipulator, and solves the problem of prediction and analysis of base attitude disturbance caused by the movement of the manipulator in a free-floating mode.
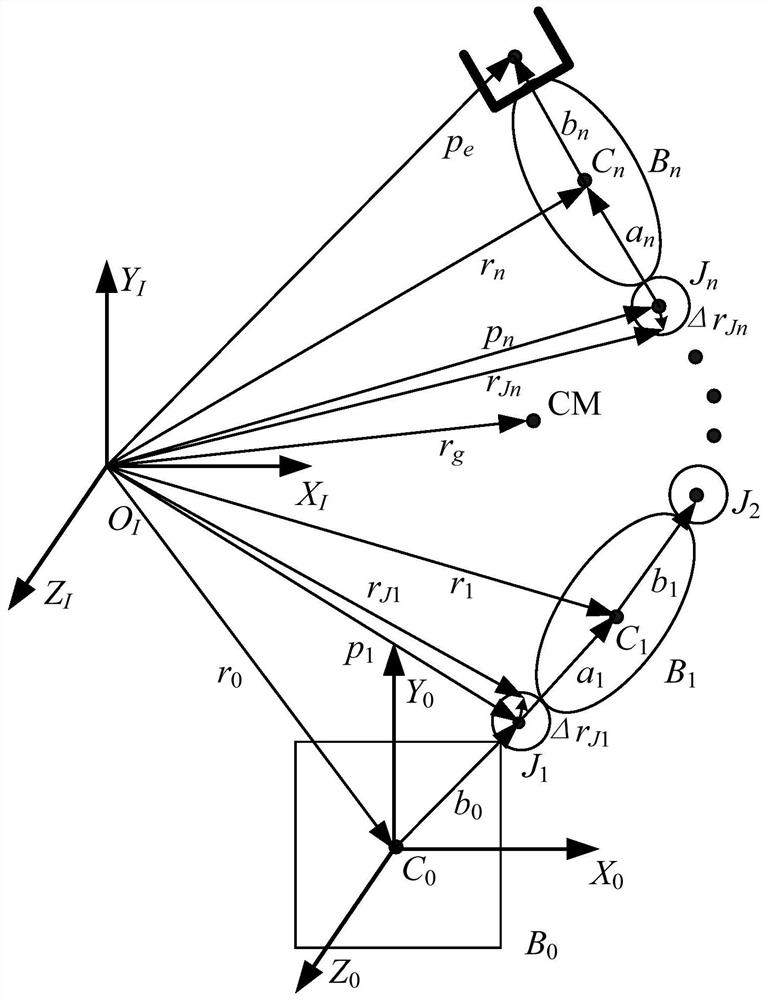
[0041] figure 1It is a schematic diagram of the modeling of the space free-floating robot of the present invention. The space robot system is composed of a base and a mechanical arm. Each joint of the arm realizes the movement of the robotic arm and drives the end effector to complete the space manipulation task. Compared with the motion mode under the control of the base, the free-floating mode can ensure the safety of space close-range operation tasks and can save active energy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com