Robustness dynamic motion method based on reinforced learning and all-body controller
A technology of reinforcement learning and dynamic motion, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., can solve the problems of low robustness and low computational efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be further described in detail below with reference to the drawings and specific embodiments.
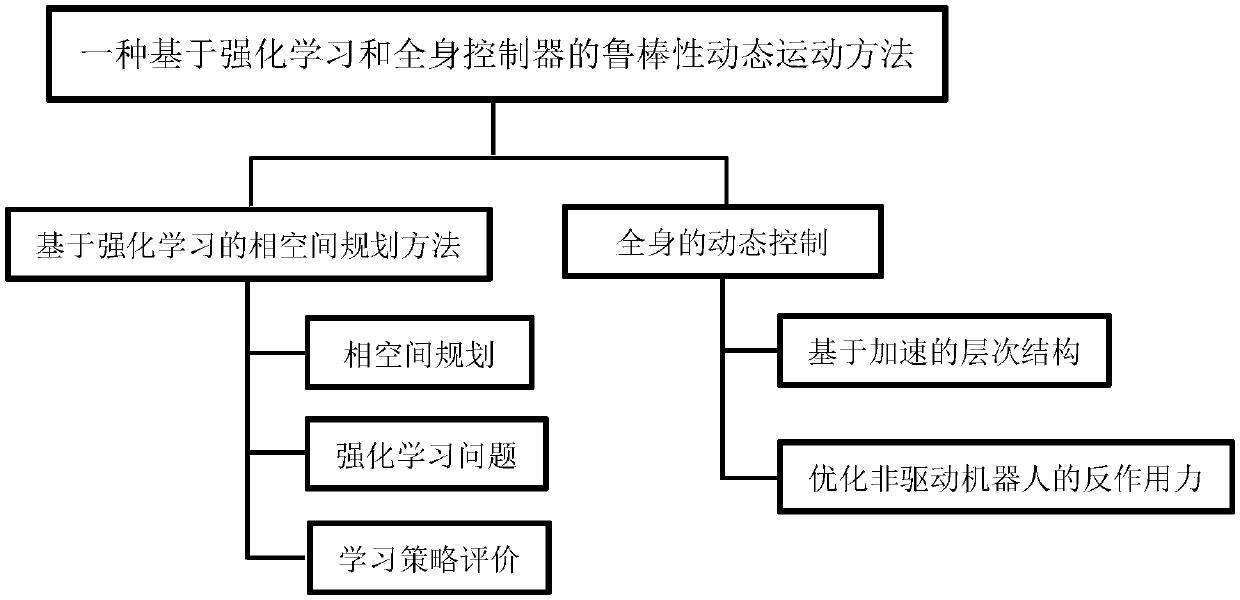
[0058] figure 1 It is a system frame diagram of a robust dynamic motion method based on reinforcement learning and a whole body controller of the present invention. It mainly includes the phase space planning method based on reinforcement learning and the dynamic control of the whole body.
[0059] Phase space planning method based on reinforcement learning (1), a reinforcement learning process around the phase space planning framework (PSP) is designed, the model is simplified by using the inherent directional walking constraints of PSP, and the effective step size switching information is generated by using the simplified model. Spatial planning methods mainly include phase space plan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com