Balanced and stable control method for quadruped robot based on gait adjustment in three-dimensional space
A stable control method, the technology of quadruped robot, applied in attitude control and other directions to achieve the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
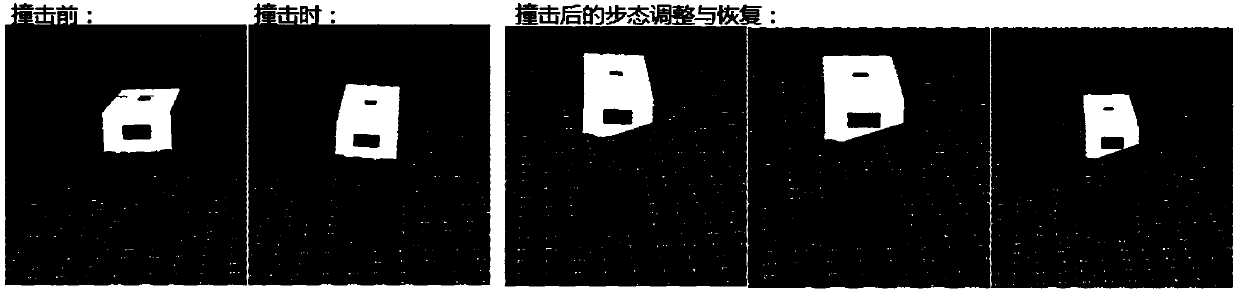
[0031] The invention is based on the stability control of the quadruped robot based on the gait adjustment in the three-dimensional space. This method ensures that the quadruped robot can actively adjust the external side impact, rough terrain, etc. to maintain stable walking while maintaining the normal movement target. The specific process of this method is as follows.
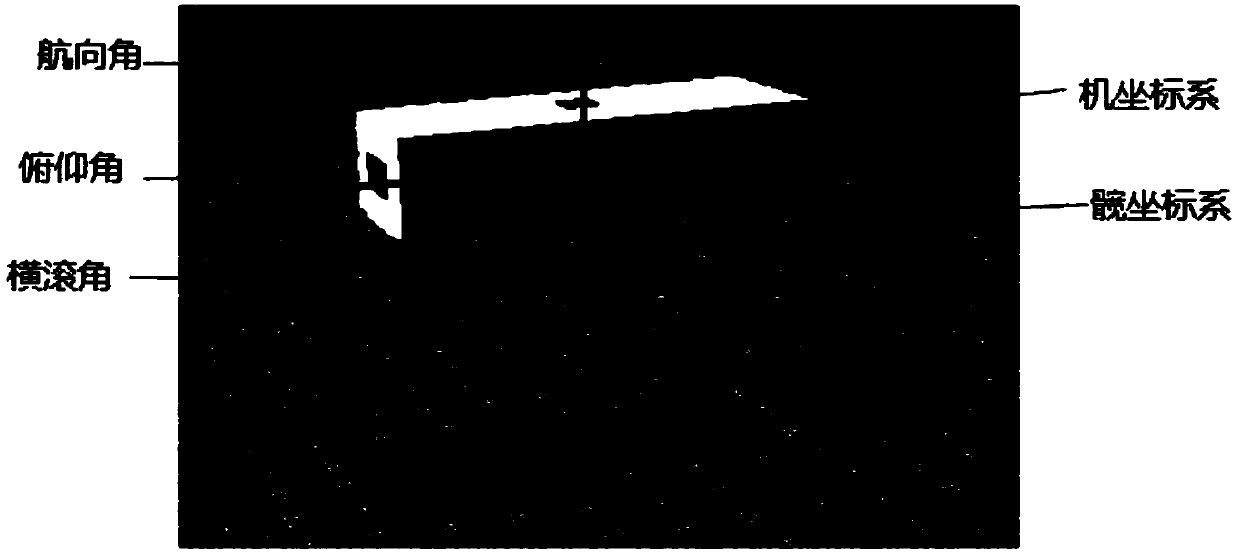
[0032] Establish a trunk-based mobile coordinate system and a hip-based local coordinate system for a quadruped robot, such as figure 1 As shown, the motion of the quadruped robot is thus described. The pitch angle, pitch angular velocity, roll angle and roll angular velocity of the quadruped robot are collected by the VG sensor. The acquisition frequency is 100hz.
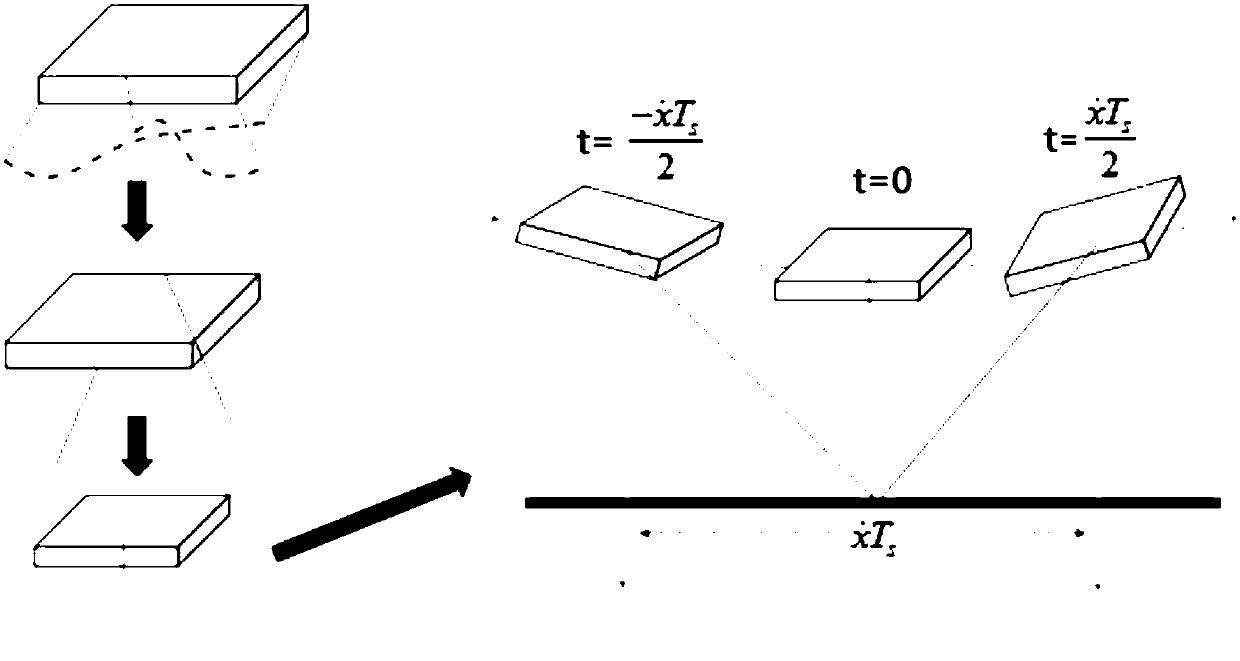
[0033] Compare the current torso posture of the quadruped robot collected by the sensor with the given torso angle and calculate the foothold gait of the quadruped robot through the calculation of the spring-loaded inverted pendulum model, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com