Unmanned plane set surveying and mapping method based on AGV matrix
A technology of unmanned aerial vehicle and crew, applied in the field of aerial surveying and mapping, can solve the problems of obstacle error, large-scale map surveying and mapping error, etc., and achieve the effect of improving surveying and mapping efficiency and increasing the area of single surveying and mapping.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] A method for surveying and mapping of unmanned aerial vehicles based on an AGV matrix. The surveying and mapping unmanned aerial vehicle is used as an AGV matrix, and multiple measurements of the surveying and mapping unmanned aerial vehicle are integrated to obtain a surveying and mapping map; the central unmanned aerial vehicle 1 controls the auxiliary unmanned aerial vehicle 2 Carry out multiple surveying and mapping within the set AGV matrix; the central UAV 1 transmits the integrated surveying and mapping data to the remote client through the main controller;
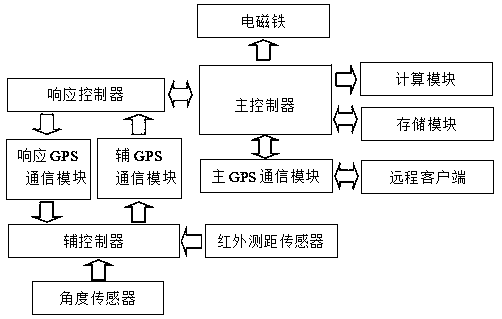
[0040] Such as Figure 4 As shown, the surveying and mapping aircraft group includes a central UAV 1, four auxiliary UAVs 2, and remote clients; the central UAV 1 includes a rack, a main control mechanism, and four corresponding auxiliary UAVs 2 four response control mechanisms provided; the frame of the central UAV 1 extends four flying arms 3 along the four directions of its base, and the free end of the f...
Embodiment 2
[0046] This embodiment is further optimized on the basis of Embodiment 1, and the calculation module sets every 10 centimeters as the turning points. In the present invention, the AGV matrix of the entire measurement range is set as a coordinate system with the center drone 1 as the center point, and then the coordinate system is divided into four coordinate blocks according to the four auxiliary drones 2; Set the turning point every 10 centimeters, and establish a virtual coordinate matrix; the auxiliary UAV 2 defines the landmark values of each group, as well as the rows and columns through the virtual coordinate matrix made by the central UAV 1 and human operations to conduct separate surveying and mapping .
[0047] Other parts of this embodiment are the same as those of Embodiment 1, so details are not repeated here.
Embodiment 3
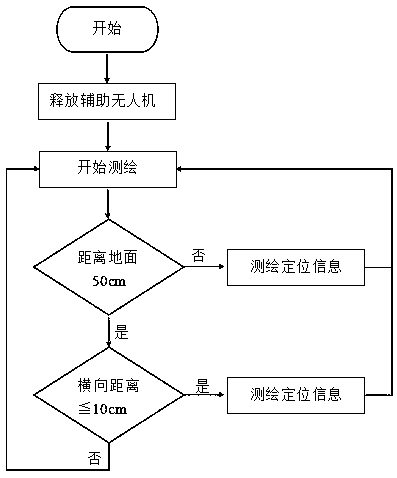
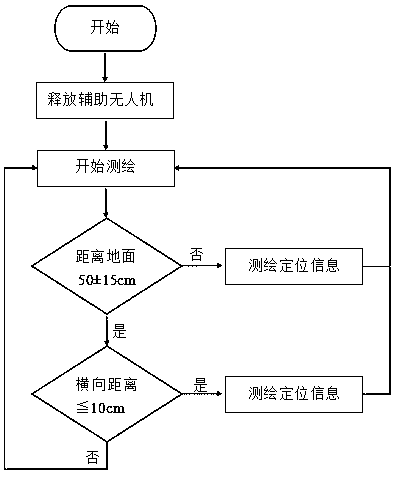
[0049] This embodiment is further optimized on the basis of embodiment 1 or 2, as image 3 As shown, the surveying and mapping is carried out in the surveying and mapping area; when the auxiliary UAV 2 detects through the positioning sensor that the height vertically reaching the ground is not equal to 50±15cm, it indicates that the height of the surveying and mapping area changes, and the auxiliary UAV 2 hovers at The measurement point, and the auxiliary UAV 2 measures the positioning information through the positioning sensor, and measures the distance from the auxiliary UAV 2 to the central UAV 1 and the horizontal angle between the auxiliary UAV 2 and the central UAV 1. The height range from the ground is increased, which effectively removes the interference of ground debris and improves the quality of surveying and mapping.
[0050] Other parts of this embodiment are the same as those of Embodiment 1 or 2 above, so details are not repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com