A cloud-simulated intelligent obstacle avoidance system for wheelchairs
An intelligent obstacle avoidance and wheelchair technology, applied in 3D modeling, vehicle rescue, details involving processing steps, etc., can solve problems such as wheelchair operation, poor operation, and inability to respond in time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
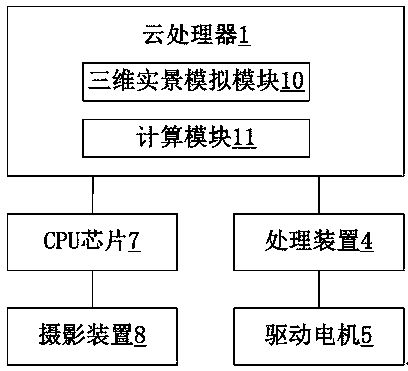
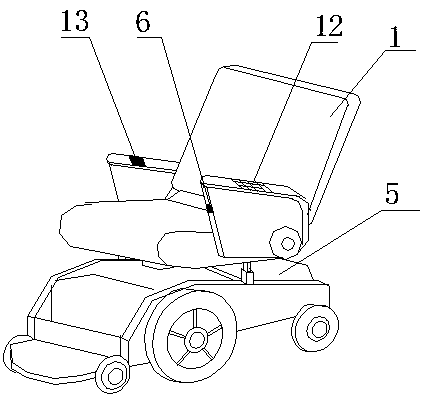
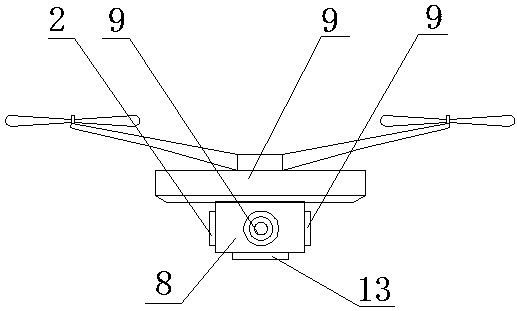
[0027] The reference picture is Figure 1-5 . A cloud simulation intelligent obstacle avoidance system for wheelchairs, comprising: a cloud processor 1, an unmanned aerial vehicle 2, a wheelchair 3, the wheelchair 3 includes a processing device 4, a drive motor 5, a first camera 6, and the unmanned Machine 2 comprises CPU chip 7, photographing device 8, and described cloud processor 1 is synchronized with described processing device 4 and described CPU chip 7 data, and described first camera 6 is used for taking real-time image around wheelchair 3, and transmits to Described cloud processor 1, described photographing device 8 four sides are all provided with second camera 9, described photographing device 8 is used for shooting real-time street view, and described real-time street view is synchronized to described cloud processor 1, so The cloud processor 1 includes a three-dimensional real-scene simulation module 10 and a computing module 11, and the three-dimensional real-s...
Embodiment 2
[0038] The reference picture is Figure 6 . When the drive motor 5 drives the wheelchair 3 to change direction, the cloud processor 1 simulates the direction change circuit according to the three-dimensional real scene.
[0039] The cloud processor 1 judges whether there is a dangerous situation within the surrounding range of the wheelchair 3 according to the three-dimensional real scene image, and if so, sends an emergency avoidance instruction to the processing device 4, and the emergency avoidance instruction is the first priority instruction , the processing device 4 sends an emergency avoidance signal to the drive motor 5 according to the emergency avoidance command, and the drive motor 5 controls the wheelchair 3 to perform emergency avoidance according to the emergency avoidance signal.
[0040] Specifically, the cloud processor 1 simulates the reversing route of the wheelchair 3, and judges whether there is an obstacle on the route. A fine-tuning signal is sent to t...
Embodiment 3
[0043] The reference picture is Figure 2-3 . The UAV 2 is a shared UAV, and the UAV 2 has a positioning device, and the positioning device is used for positioning, and the CPU chip 7 sends the positioning device to the cloud processor 1 .
[0044] : The wheelchair 3 is also provided with a user port 12, the cloud processor 1 sends the positioning to the user port 12, and the user selects the drone 2 through the user port 12.
[0045] The drone 2 and the wheelchair 3 are provided with a wireless device 13 , and when the drone 2 arrives at the user's location, the drone 2 and the wheelchair 3 are associated through the wireless device 13 .
[0046] Specifically, the cloud processor marks the position of the drone 2 on the electronic map according to the positioning of the positioning device 12 of the drone 2, and synchronizes it to the processing device 4, and the processing device 4. The electronic map is displayed through the user port 12, and the user can select a drone th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com