Cruise section autonomous navigation position deviation correction method
A technology of deviation correction and autonomous navigation, applied in the field of deep space exploration, which can solve the problems of large ephemeris error and limited number of asteroids
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
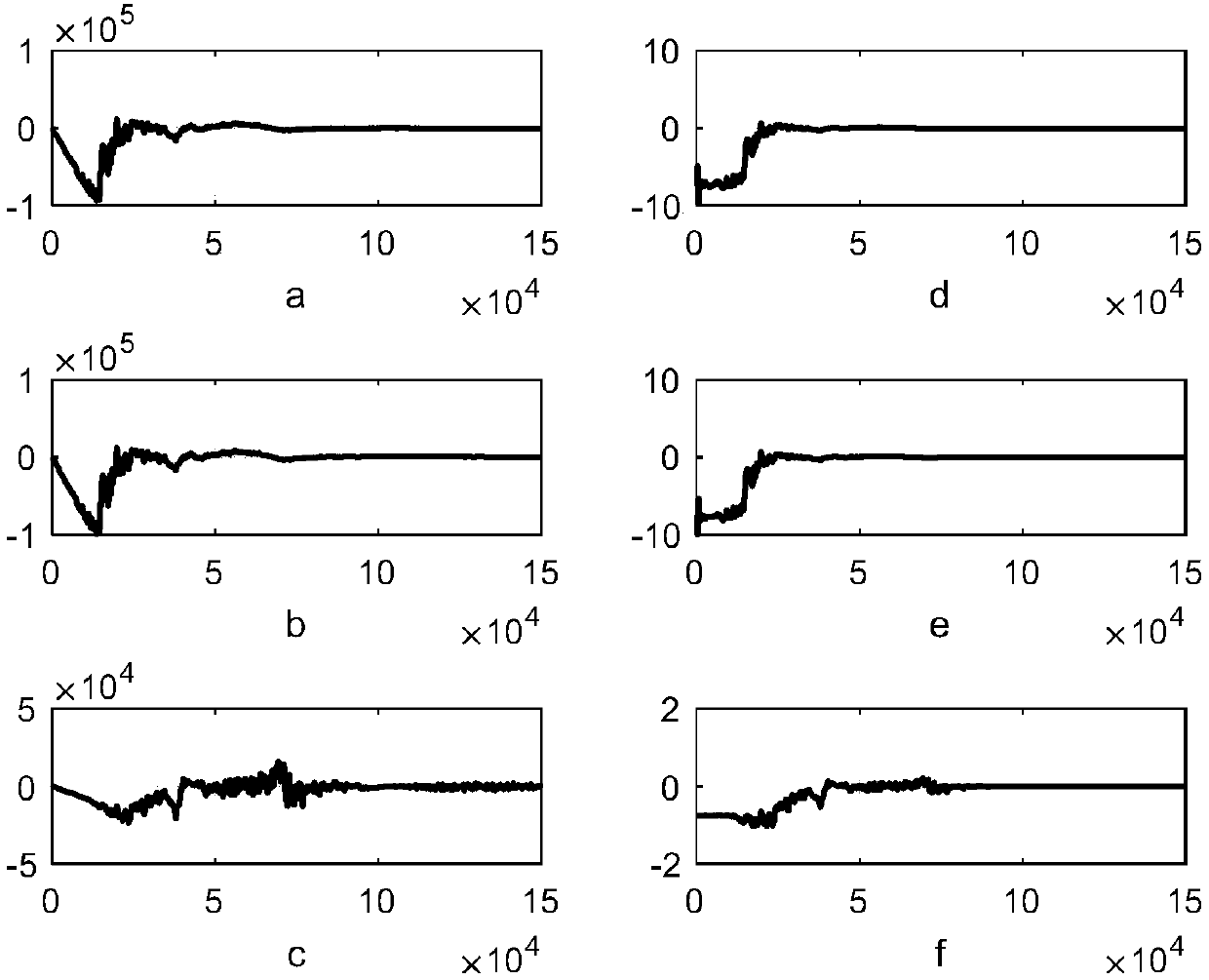
[0080] This example conducts simulation verification for the cruising segment of deep space exploration. Use an optical camera to measure the line-of-sight information from the probe to the center of mass of the visible planet, and correct the aberration effect at the same time, and then use the Extended Kalman Filter (EKF) to jointly estimate the position and velocity of the probe to achieve high-precision real-time Autonomous navigation.
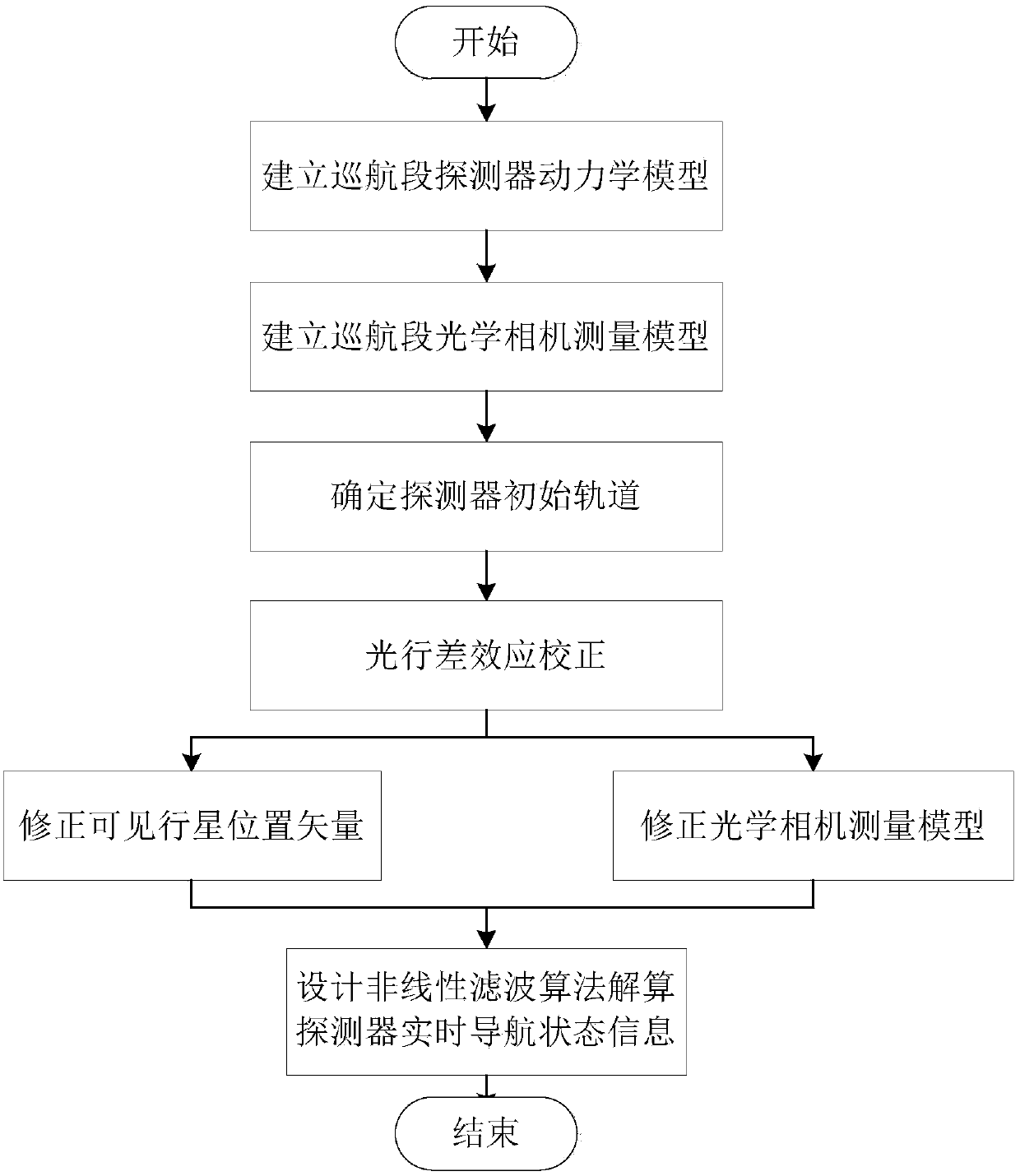
[0081] A method for correcting position deviation of autonomous navigation in the cruising segment disclosed in this example includes the following steps:
[0082] Step 1: Establish the dynamic model of the cruise segment detector.
[0083] The movement of the probe in the solar system is mainly affected by the gravitational field of the sun, and its dynamics satisfy the Kepler two-body equation. In order to establish the dynamic model of the probe during the cruising period as accurately as possible, the perturbation term of the model t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com